BECKHOFF KL5051 Benutzerhandbuch
Seite 14
Datenaustausch, Funktion
14
KL5051
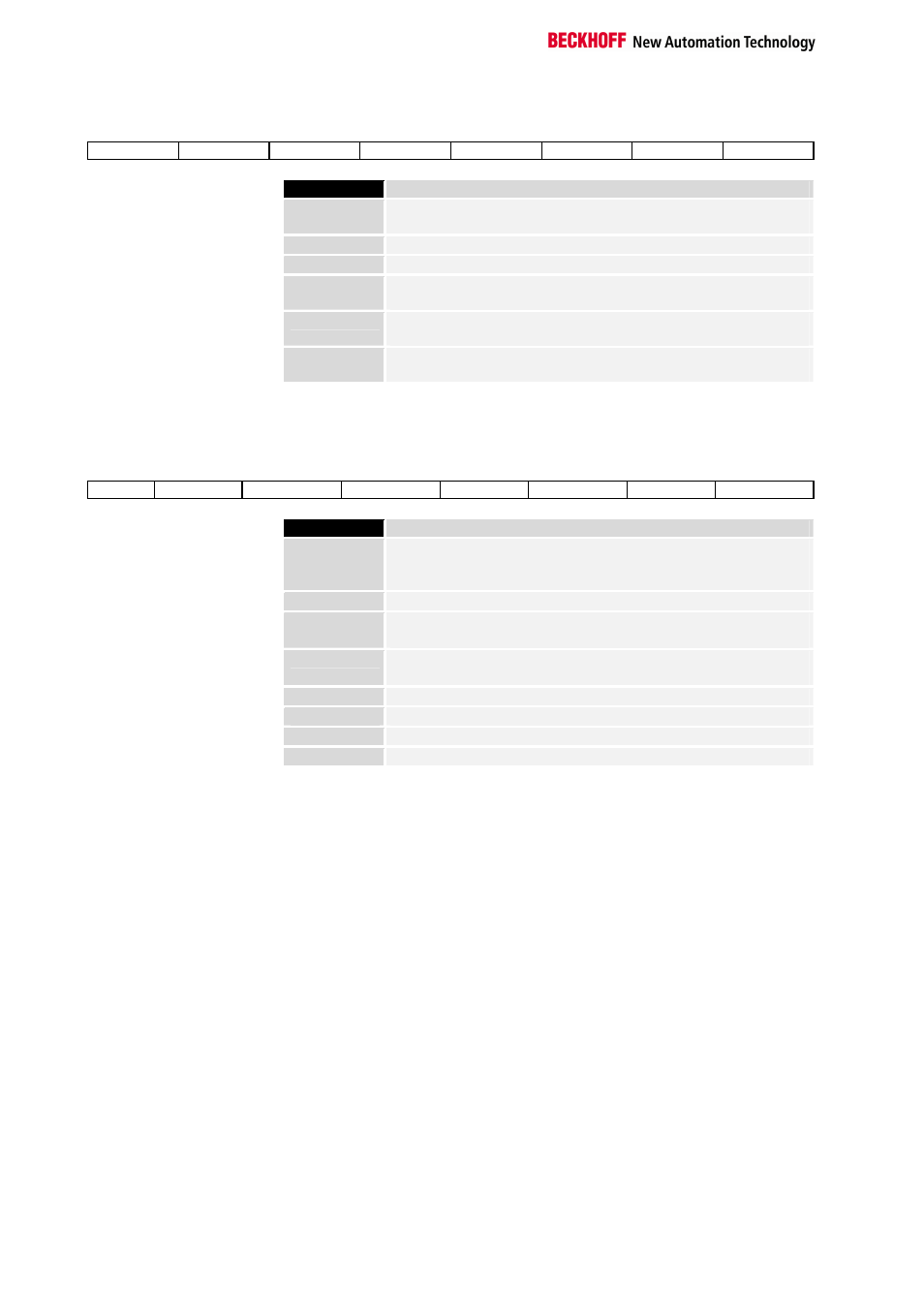
MSB
REG=1
RD_PARH
RD_PARL
PUT_HW
PUT_LW
TRS_BUFF
Bit
REG
Dieses Bit schaltet zwischen der Servo-Parameter- und Servo-
Control/Status- Kommunikation um.
RD_PARH
Read Parameter High Word (Parameter Adresse in A4)
RD_PARL
Read Parameter Low Word (Parameter Adresse in A4)
PUT_HW
Schreibe High Word des Parameters in Buffer (A4, A5 Parame-
ter High Word).
PUT_LW
Schreibe Low Word des Parameters in Buffer (A4, A5 Parameter
High Word).
TRS_BUFF
Schreibe Daten vom Buffer auf Parameter Adresse, die durch
A4 festgesetzt wird.
Parameter Status-Byte E3
in der Parameter
Betriebsart
Bei der Parameter Kommunikation (REG=1) mit dem Servo werden im
Status-Byte verschiedene Quittungen ausgegeben
MSB
REG=1
KOM_ERR RD_PARH_Q RD_PARL_Q SERV_ERR PUT_HW_Q
PUT_LW_Q TRS_BUF_Q
Bit
REG
1: Der Kanal bestehend aus A3,A4,A5,E3,E4,E5 befindet sich in
der Betriebsart mit der die Parameter Kommunikation
durchgeführt wird..
KOM_ERR
Ein Fehler in der Datenübertragung ist aufgetreten.
RD_PARH_Q
In E4,E5 steht das High Word des angeforderten
Parameterwertes.
RD_PARL_Q
In E4,E5 steht das Low Word des angeforderten
Parameterwertes.
SERV_ERR
Das Leistungsteil des Servo meldet einen Fehler.
PUT_HW_Q
Das High Word wurde in den Buffer geschrieben.
PUT_LW_Q
Das Low Word wurde in den Buffer geschrieben.
TRS_BUF_Q
Daten wurden erfolgreich übertragen.