5 fehlerbehandlung und diagnose, 1 diagnose im sps-programm, 5fehlerbehandlung und diagnose – BECKHOFF CX210000x4 Benutzerhandbuch
Seite 38: 1 diagnose im spsprogramm
Fehlerbehandlung und Diagnose
5
Fehlerbehandlung und Diagnose
5.1
Diagnose im SPSProgramm
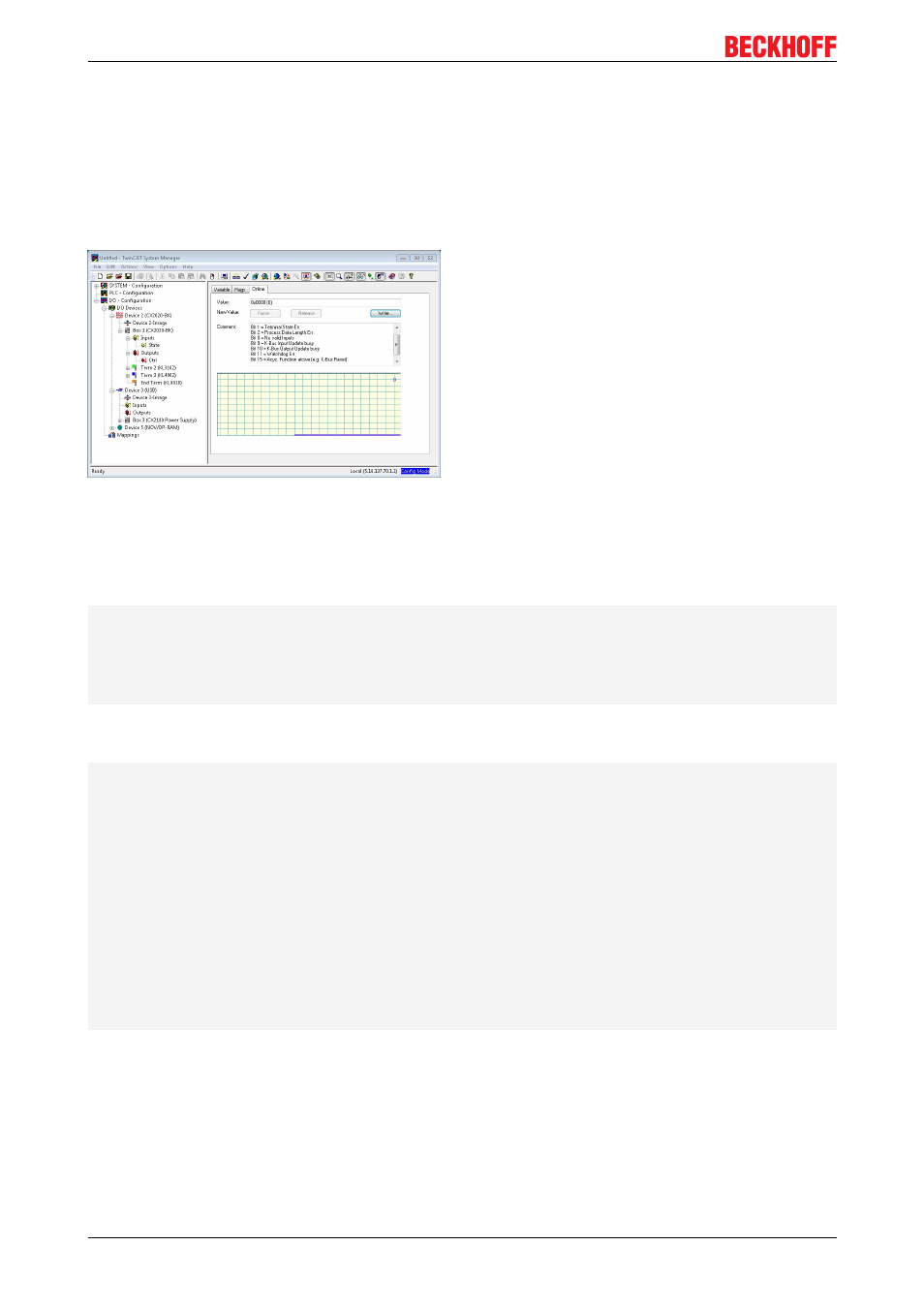
Zur Analyse des Klemmbus (KBus) kann auf das Register State über TwinCAT von einem SPSProgramm
zugegriffen werden.
Im Folgenden wird die Fehleranalyse als Beispiel vorgestellt.
Für die Fehleranalyse werden im Wesentlichen ein Signal/Variable benötigt:
• State (gibt den Zustand des Busses an: 0 > kein Fehler)
In dem SPSProgramm müssen dazu analog externe Variablen angelegt werden:
VAR
k_bus_state AT %IB2 : USINT;
END_VAR
In dem SPS Programm kann dann der Fehler wie folgt bestimmt werden (es handelt sich hier um
Pseudocode, der so direkt nicht lauffähig ist)
....
IF k_bus_state != 0 THEN (* auf dem KBus ist ein Fehler aufgetreten *)
IF k_bus_state.1 = 1 THEN melde Fehler; (* Klemmenzustandsfehler *) END_IF
IF k_bus_state.2 = 1 THEN melde Fehler; (* Prozessdatenlänge ungültig *) END_IF
IF k_bus_state.8 = 1 THEN melde Fehler; (* keine gültigen Eingänge *) END_IF
IF k_bus_state.9 = 1 THEN melde Fehler; (* K_bus Input Update ist aktiv *) END_IF
IF k_bus_state.10 = 1 THEN melde Fehler; (* K_bus Output Update ist aktiv *) END_IF
IF k_bus_state.11 = 1 THEN melde Fehler; (* Watchdog Fehler *) END_IF
IF k_bus_state.15 = 1 THEN melde Fehler; (* Bus ist asynchron *) END_IF
END_CASE
k_bus_request := TRUE; (* Rücksetzen des Busses, wenn Fehler beseitigt, dann startet der Klemm
bus wieder *)
....
Damit die Steuerung und die Register zusammen arbeiten, müssen sie im System Manager verknüpft
werden.
CX210000x4
38
Version 1.0