6 minimaler abstand der motoren zueinander – BECKHOFF AL2000 Linear servomotor Benutzerhandbuch
Seite 32
Mechanische Installation
7.4.6
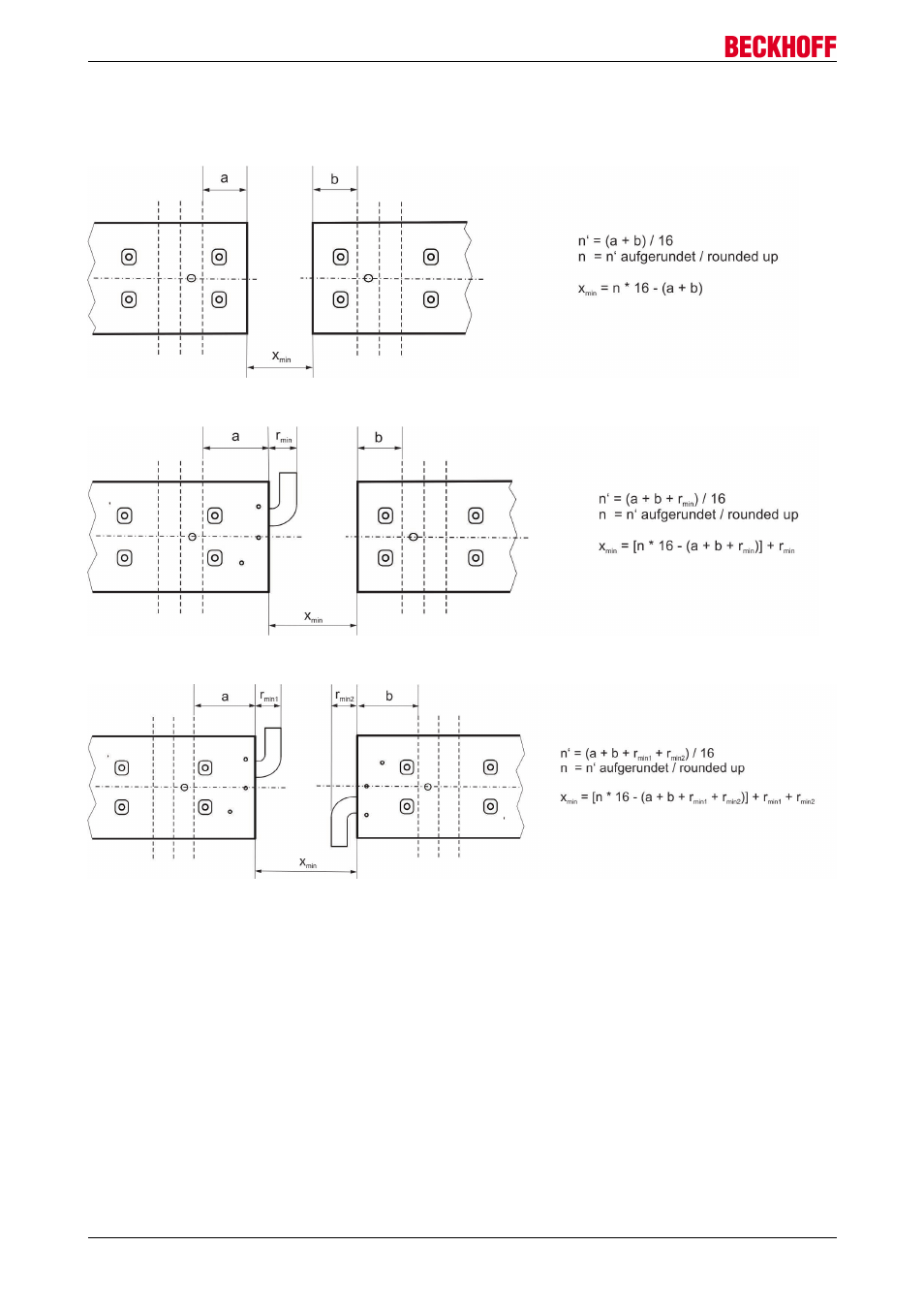
Minimaler Abstand der Motoren zueinander
a) Motorleitungen voneinander weg zeigend
b) Motorleitungen in dieselbe Richtung zeigend
c) Motorleitungen zeigen aufeinander
x
min
= Minimaler Abstand der Motoren zueinander
n = Hilfsvariable
a = Abstand zwischen Phasenlinie und Gehäusewand Motor 1 (siehe vorherige Seiten)
b = Abstand zwischen Phasenlinie und Gehäusewand Motor 2 (siehe vorherige Seiten)
r
min
= Minimaler Biegeradius der Motorleitung (siehe Kapitel Technische Daten [
48])
Berechnung für Beispiel a):
Berechnung für Beispiel c):
(Motor AL2006 und AL2012)
(Motor AL2006 und AL2012)
n‘ = (23 + 22) / 16 = 2,81
n‘ = (43 + 46 + 96 + 96) /16 = 17,56
n = 3 (aufgerundet)
n = 18 (aufgerundet)
x
min
= 3 * 16 – (23 + 22) = 3
x
min
= [18 * 16 – (43 + 46 + 96 + 96)] + 96 + 96 = 199
LinearServomotor AL2000
32
Version 4.0