Led verhalten – BECKHOFF BK51x0 Benutzerhandbuch
Seite 2
BECKHOFF New Automation Technology
Seite 2/4
Update Info CANopen Version 3 auf Version 4.01
Stand: 30.04.2002
1.2
Firmware-Performance gesteigert
Neu: Das PDO-Handling ist deutlich schneller geworden (ca. Faktor 3-4).
Vorteil: Kürzere Reaktionszeiten bei Ein- und Ausgangsänderung, höhere Abtastrate.
Auswirkungen beim Einsatz neuer Buskoppler in bestehenden Netzwerken: Unter
Umständen erhöht sich die Buslast – vor allem, wenn PDOs mit analoge
Eingangsdaten ereignisgesteuert („ungebremst“) kommunizieren. Abhilfe:
1. Durch Event-Timer (siehe unten) zyklisches Update der PDOs mit analogen
Eingangsdaten aktivieren (dabei Global Interrupt Enable 0x6423 abschalten!) oder
2. entsprechende PDOs synchron kommunizieren (Transmission Type von 255 oder
254 z.B. auf 1,2 oder 5 umstellen). Hinweis: Bei Verwendung der Beckhoff
CANopen PCI Karten FC510x wird die Buslast in einer Variablen angezeigt.
1.3
PDO Event Timer wird unterstützt
Neu:
TxPDOs: Auch wenn gerade kein Ereignis aufgetreten ist, werden
ereignisgesteuerte PDO nach Ablauf des Event Timers verschickt. Bei einem
Ereignis wird der Event Timer zurückgesetzt. Hinweis: das Ereignis „analoge
Eingangsänderung“ wird durch das Objekt 0x6423 ein- oder abgeschaltet (Default)
werden. RxPDOs: Der Event-Timer wird als Watchdog benutzt um das Eintreffen
von ereignisgesteuerten PDOs zu überwacht. Sollte innerhalb der eingestellten Zeit
kein PDO eingetroffen sein, so geht der Busknoten in den Fehlerzustand.
Vorteil: PDO-Sendeverhalten kann nun noch individueller eingestellt werden. So können
z.B. TxPDOs mit analogen Eingängen mit SNYC-unabhängigen Zykluszeiten
gesendet werden. Auch das Eintreffen von ereignisgesteuerten RxPDOs kann nun
überwacht werden.
Auswirkungen beim Einsatz neuer Buskoppler in bestehenden Netzwerken: keine
1.4
PDO mit I/O-Update durchsynchronisiert
Neu: Wenn alle PDOs auf synchrone Kommunikation eingestellt sind (Transmission Type
0...240), so wird das I/O-Update durch den Empfang des SYNC Telegramms
getriggert.
Vorteil: Synchronisierung auch des E/A Verhaltens (bisher nur Kommunikation synchron).
Auswirkungen beim Einsatz neuer Buskoppler in bestehenden Netzwerken: keine
2.
LED Verhalten
2.1
LED Verhalten nun nach DRP303-3
Neu: Das LED Verhalten wurde an die neue CiA Empfehlung DRP303-3 angepasst.
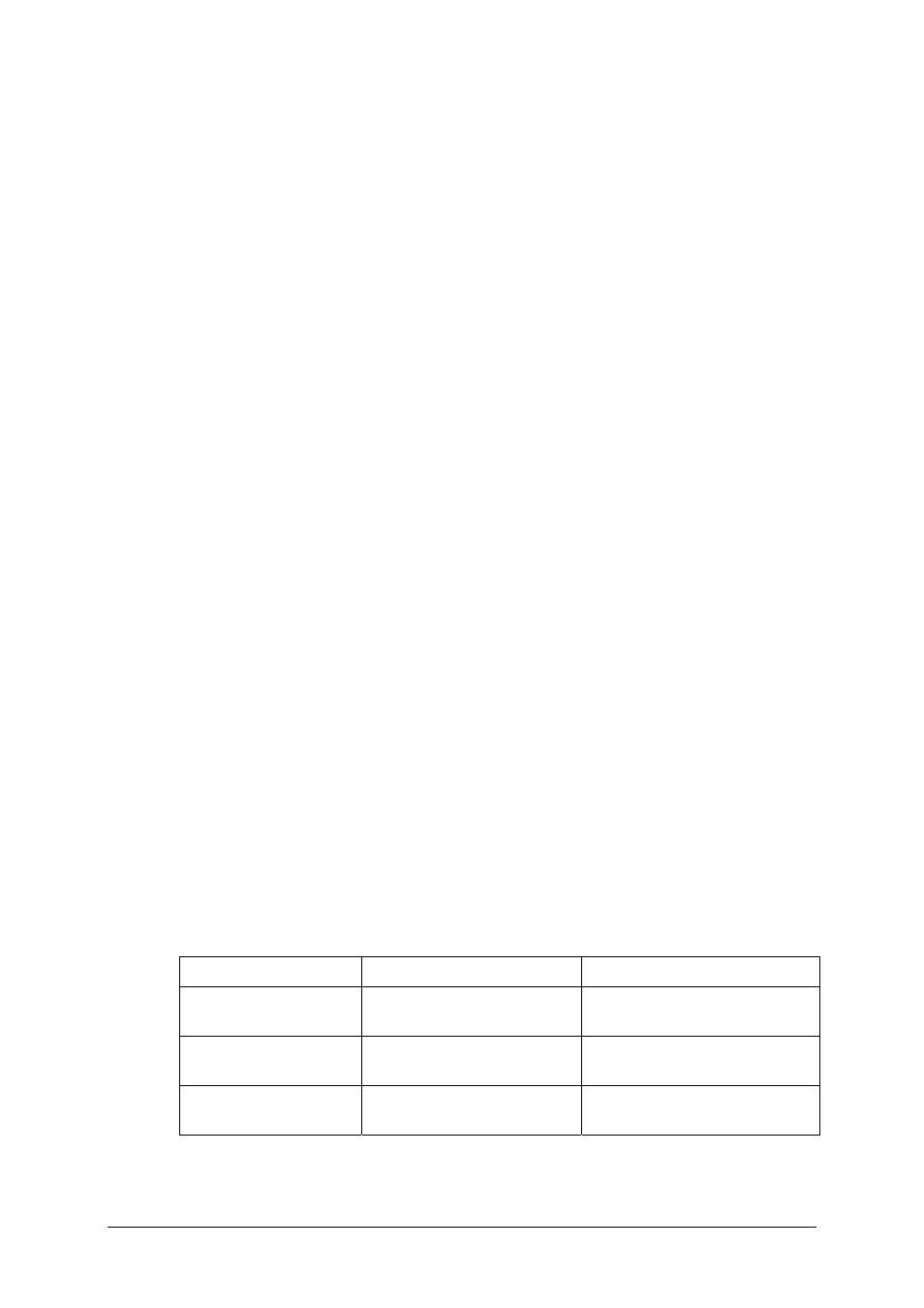
Änderungen:
Gerätezustand
LED Verhalten alt
LED Verhalten neu
Gerät gestoppt
RUN LED aus
RUN LED blinkt einmal,
danach 1 s Pause
CAN warning limit
überschritten
ERR LED blinkt ständig
ERR LED blinkt einmal,
danach 1 s Pause
Event Timer: RxPDO
fehlt
-
ERR LED blinkt 4 x,
danach 1 s Pause
Vorteil: Einheitliches, weitgehend herstellerunabhängiges LED Verhalten