Funktionsbeschreibung software – BECKHOFF M4400 Benutzerhandbuch
Seite 5
M4400 Schrittmotormodul
Beckhoff II/O-System
Datum : 8.3.94
Version : 1.1
Seite 5 von 11
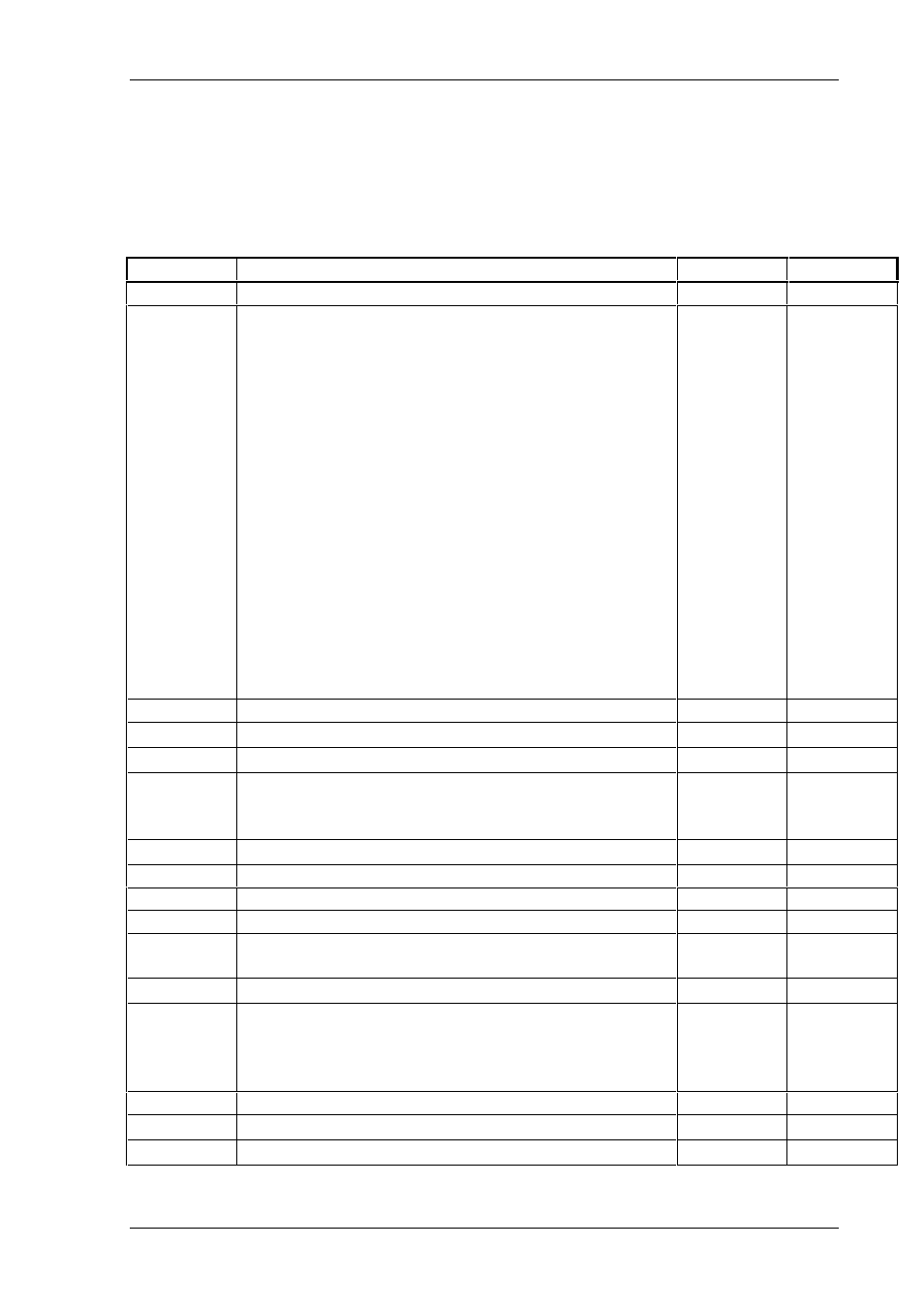
2. Funktionsbeschreibung Software
Adresse
Inhalt
Einheit
Format
0-15
gesperrt
16
Commend Word
Bit 0.0 = Positionierung Start
Bit 0.1 = Drehzahlregler Start *
Bit 0.2 = Referenzpunktfahrt Start
Bit 0.3 = frei
Bit 0.4 = frei
Bit 0.5 = frei
Bit 0.6 = Notstop (Notrampe)
Bit 0.7 = Bewegung Stop bei Drehzahlfahrt *
Bit 1.0 = Hilfsausgang setzen *
Bit 1.1 = Berechne Bahnparameter
Bit 1.2 = Absolutbewegung (=0), oder
Relativbewegung
Bit 1.3 = Lineare Interpolation *
Bit 1.4 = Initialisieren
Bit 1.5 = Initialisierungsdaten ins EEPROM
übernehmen *
Bit 1.6 ... 1.7 optional frei
int
17...19
frei
20, 21
Absolutwert Positionierung
µ
m
long
22, 23
Relativwert Positionierung, Vorzeichen ist die Richtung
µ
m
long
24, 25
Wegproportionalfaktor bei relativer Positionierung
(lineare Interpolation), Relative Wegstrecke normiert mit
100 000 000 H *
26, 27
Fahrgeschwindigkeit für Positionierung
µ
m/sec
long
28, 29
reserviert
30
Drehzahlsollwert für Drehzahlregler *
UPM
int
31...39
reserviert
40, 41
Korrekturvektor vom Referenzpunkt zum Nullpunkt der
Achse (wird nach Erreichen des Referenzpunktes aktiv)
42, 43
Geschwindigkeit für Referenzpunktfahrt
µ
m/sec
long
44
Referenzstatus
Bit 0.0 = Richtung (0 links, 1 rechts)
Bit 0.1 = Typ des Schalters, (0 Öffner, 1 Schließer)
Bit 0.2 = Flanke Ref.-Schalter (0 steigend, 1 fallend)
int
45
frei
46, 47
Software-Endschalter MINIMAL
µ
m
long
48, 49
Software-Endschalter MAXMAL
µ
m
long