BECKHOFF M4400 Benutzerhandbuch
Seite 6
M4400 Schrittmotormodul
Beckhoff II/O-System
Seite 6 von 11
Version : 1.1
Datum : 8.3.94
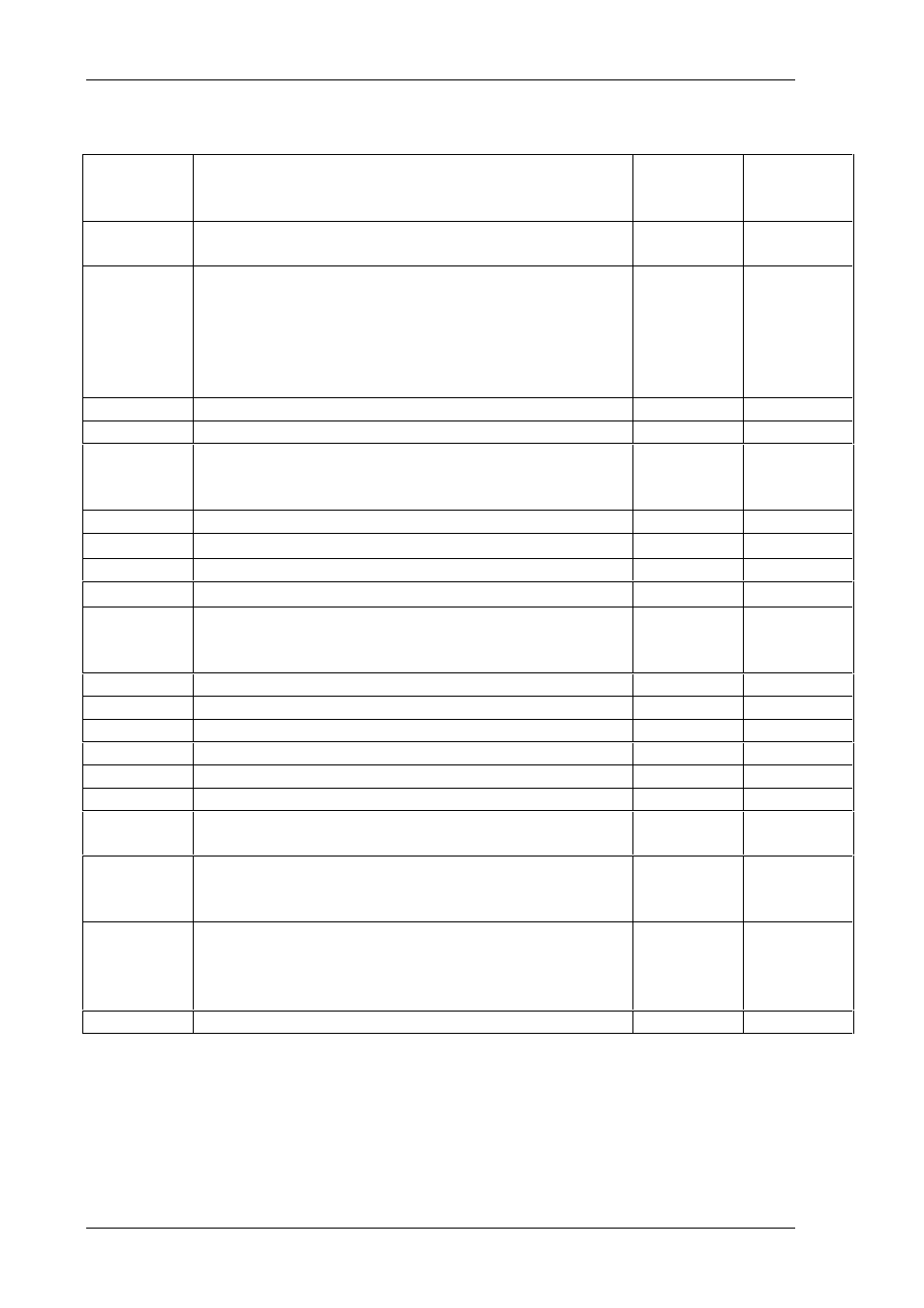
Fortsetzung:
50, 51
Meßlängen pro Umdrehungen = W50 / W51
Ungeradzahlige Meßlängen können durch geeignete
Wahl von W50 und W51 hochgenau dargestellt werden.
µ
m
int, int
52
Motorauflösung
Schritte pro
Umdrehung
int
54
Ansteuerung
1 = 2 - Phasen-Vollschritt
2 = 2 - Phasen-Halbschritt
3 = 5 - Phasen-Vollschritt *
4 = 5 - Phasen-Halbschritt *
5 = Microstep *
int
56
Microstepfaktor (Anzahl Microsteps / Vollschritt) *
int
57...59
frei
60
Beschleunigungstyp
1 = linear
weitere Typen in Vorbereitung
int
61
frei
62, 63
Lineare Beschleunigung
µ
m/sec2
long
64 ... 67
reserviert für weitere Beschleunigungstypen
68, 69
Beschleunigung Notstop
µ
m/sec2
long
70
Stromrampe über Drehzahl 1...100%
(Lineare Steigerung des Stroms über der Schrittausgabe
bei Start Bewegung)
int
71
Motor Arbeitsstrom 1...255 CU (current unit)
int
72
Motor Standby-Strom 1...255 CU (current unit)
int
73
Startfrequenz
Hz
int
74
Stopfrequenz
Hz
int
75
Notstopfrequenz
Hz
int
76...79
frei
80
Schleppfehlerüberwachung *
Inkremente / Umdrehung des Drehgebers
int
81
Grenzwert für Schleppfehlerüberwachung *
maximal zulässige Abweichung in Inkrementen des
Drehgebersystems
int
82
Schleppfehlerstatus *
Bit 0.0 = Schleppfehlerüberwachung aktiv
Bit 0.1 = NOTHALT bei erkanntem Fehler
Bit 0.2 = Normaler Halt bei Fehler
83...255
frei