Werkzeugträger-kinematik, Siehe „werkzeugträger-kinematik” auf seite 175), 2 w e rk z e ug-d a te n – HEIDENHAIN iTNC 530 (340 49x-06) ISO programming Benutzerhandbuch
Seite 175
HEIDENHAIN iTNC 530
175
5.2 W
e
rk
z
e
ug-D
a
te
n
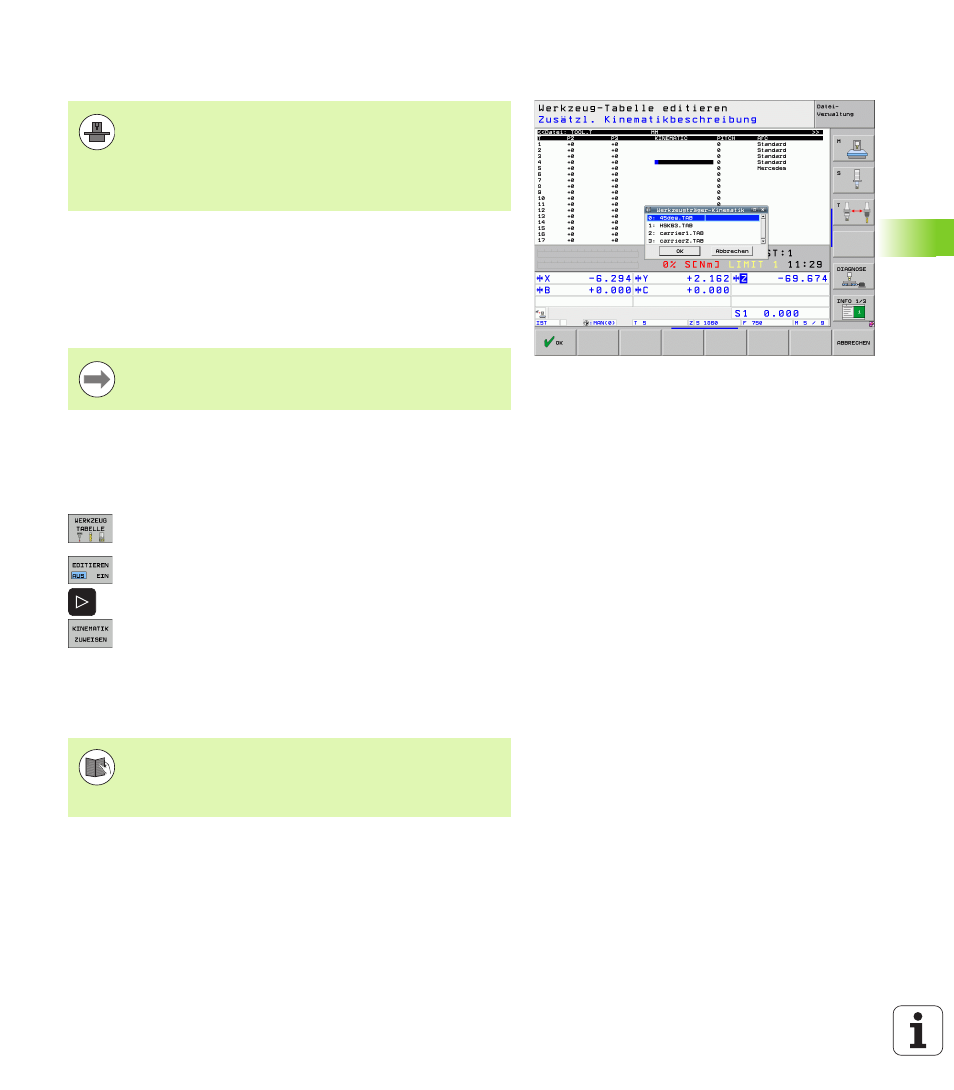
Werkzeugträger-Kinematik
In der Werkzeug-Tabelle TOOL.T können Sie in der Spalte KINEMATIC
bei Bedarf jedem Werkzeug eine zusätzliche Werkzeugträger-
Kinematik zuweisen. Im einfachsten Fall kann diese Trägerkinematik
den Spannschaft simulieren, um diesen mit in der dynamischen
Kollisionsüberwachung zu berücksichtigen. Desweiteren können Sie
über diese Funktion auf einfachste Weise Winkelköpfe in die
Maschinenkinematik integrieren.
Trägerkinematik zuweisen
Um einem Werkzeug eine Trägerkinematik zuzuweisen, gehen Sie
wie folgt vor:
U
Beliebige Maschinen-Betriebsart wählen
U
Werkzeug-Tabelle wählen: Softkey WERKZEUG
TABELLE drücken
U
Softkey EDITIEREN auf „EIN“ setzen
U
Letzte Softkeyleiste wählen
U
Liste der verfügbaren Kinematik einblenden: Die TNC
zeigt alle Trägerkinematiken (.TAB-Dateien) und alle
bereits von Ihnen parametrisierten Werkzeugträger-
Kinematiken (.CFX-Dateien) an
U
Mit Pfeiltasten die gewünschte Kinematik wählen und
mit Softkey OK übernehmen
Um Werkzeugträger-Kinematik verrechnen zu können
muss die TNC von Ihrem Maschinenhersteller angepasst
werden. Insbesondere muss Ihr Maschinenhersteller
entsprechende Trägerkinematiken oder parametrisierbare
Werkzeugträger zur Verfügung stellen.
Maschinenhanduch beachten!
HEIDENHAIN stellt Werkzeugträger-Kinematiken für
HEIDENHAIN-Tastsysteme zur Verfügung. Wenden Sie
sich bei Bedarf an HEIDENHAIN.
Beachten Sie auch die Hinweise zur Werkzeugträger-
Verwaltung in Verbindung mit der dynamischen
Kollisionsüberwachung DCM: Siehe “Werkzeugträger-
Verwaltung (Software-Option DCM)” auf Seite 356.