BECKHOFF DK9221-0210-0014 Benutzerhandbuch
Seite 2
I/O
Motion Control
Application Note DK9221-0210-0014
bewirkt im Motor ein Magnetfeld von Nord nach Süd (bei negativer Polung der Stromzufuhr und entsprechendem Wickelsinn
von Süd nach Nord). Der bewegliche Stator mit seinen Permanentmagneten richtet sich entsprechend der Richtung des äußeren
Magnetfeldes vom Stator aus.
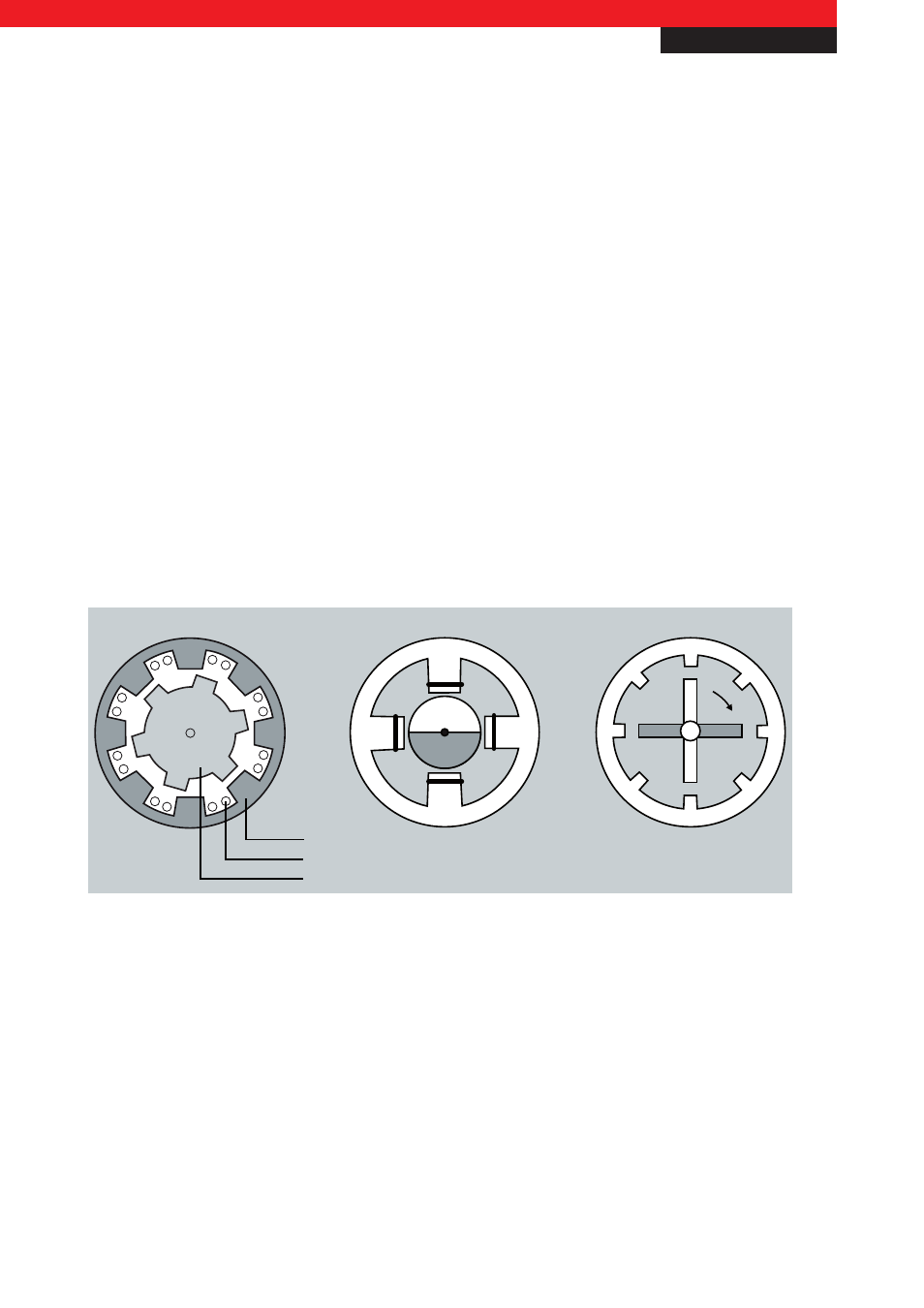
Grundtypen von Schrittmotoren
Die vielfältigen Bautypen lassen sich im Allgemeinen auf drei Grundtypen zurückführen:
1– Reluktanz-Schrittmotoren (VR)
(variable reluctance (stepping) motor)
2– Permanenterregter Schrittmotor/Klauenpolschrittmotor (PM)
(permanent magnet motor, claw-poled PM motor, Tin-Can-Motor)
3– Hybridschrittmotor (HY)
(hybrid stepping motor)
Abb. 1 Grundtypen von Schrittmotoren: Reluktanz-Schrittmotor,Permanenterregter Schrittmotor und Hybrid-Schrittmotor
Reluktanz-Schrittmotor (Abb. 1 links)
Der Rotor besteht aus einem weichmagnetischen Material, dessen Zahnteilung gegenüber der Polteilung des Stators ungleich
ist. Bei Erregung eines Strangs nimmt der Rotor die Stellung ein, in welcher der magnetische Widerstand (Reluktanz) für den
erregten magnetischen Kreis am geringsten ist. Wird der Rotor ausgelenkt, entsteht ein Drehmoment, das den Rotor wieder in
die ursprüngliche Lage zurück führt. Zum Drehrichtungswechsel benötigt der Stator mindestens zwei Strangwicklungen. Auf
Grund der unterschiedlichen Zahnteilung auf Pol und Rotor ist die Drehfeldrichtung entgegengesetzt zur Rotordrehrichtung. Im
stromlosen Zustand besitzt der Motor kein Selbsthaltemoment.
New Automation Technology
Beckhoff
2
Anwendungshinweise siehe Disclaimer auf der letzten Seite
W2
W2
W1
W1
S
N
N
N
N
N
S
S
S
W1
W2
W2
W2
W2
W1
W1
W1
Stator
Rotor
Wicklung
A
B
C
D
A‘
B‘
C‘
D‘
S
1) VR
2) PM
3) HY