BECKHOFF AX570x Benutzerhandbuch
Seite 2
Seite 2/4
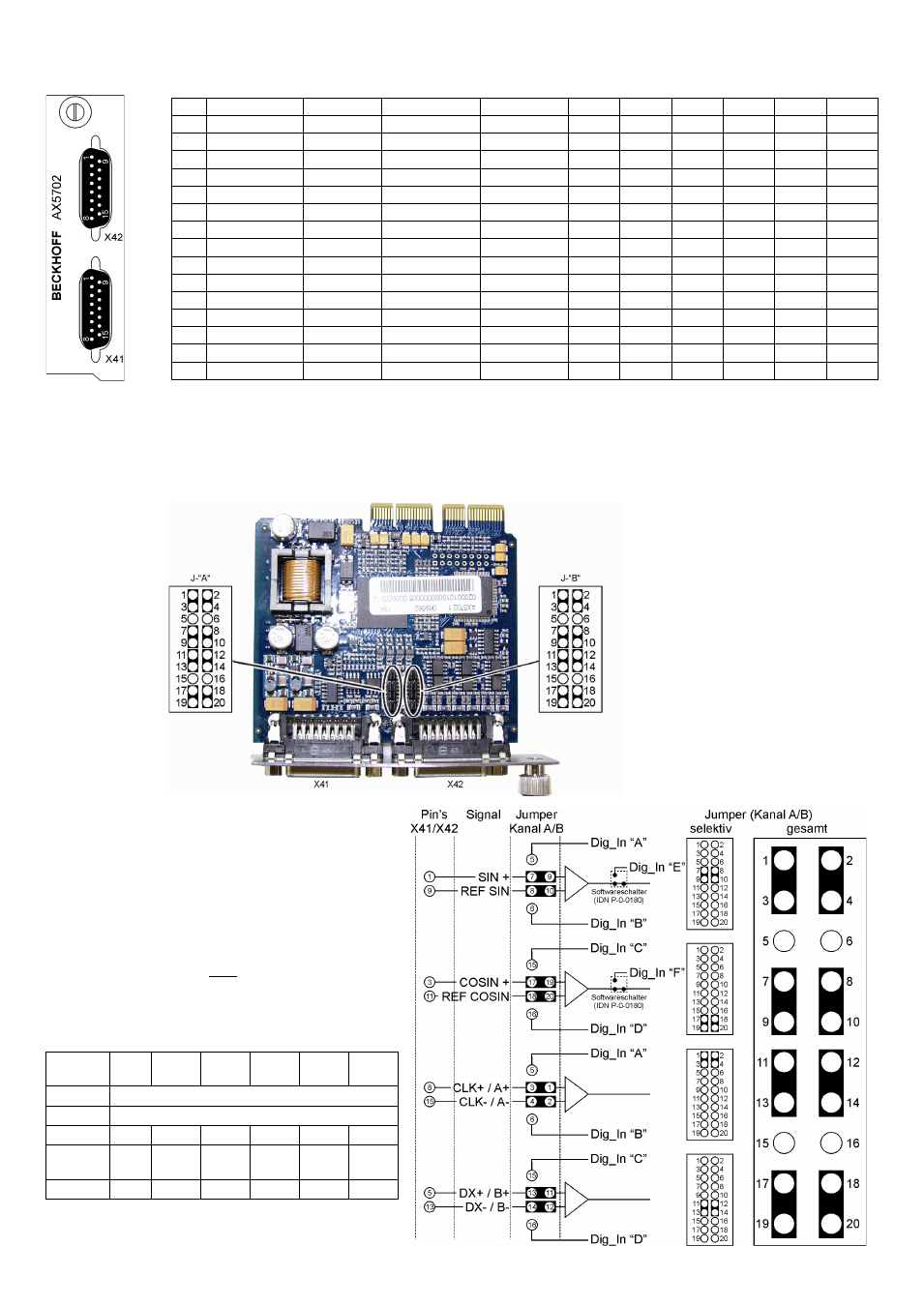
Übersicht der Buchsen X41 (Kanal A) und X42 (Kanal B)
Pin EnDAT / BiSS Hiperface Sin / Cos 1V
pp
TTL
In „A“ In „B“ In „C“ In „D“ In „E“ In „F“
1
SIN +
SIN +
SIN +
n.c.
X
X (+)
2
GND_5 V
GND_9 V
GND_5 V
GND_5 V
3
COS
COS
COS
n.c.
X
X (+)
4
U
S
_5 V
n.c.
U
S
_5 V
U
S
_5 V
5
DX+ (Data)
DX+ (Data) n.c.
B+
Y
6
n.c.
U
S
_9 V
n.c.
n.c.
7
n.c.
n.c.
REF Z
REF Z
8
CLK+ (Clock)
n.c.
n.c.
A+
Y
9
REFSIN
REFSIN
REFSIN
n.c.
X
X (-)
10
GND_Sense
n.c.
GND_Sense
GND_Sense
11
REF COS
REF COS
REF COS
n.c.
X
X (-)
12
U
S
_5 V Sense n.c.
U
S
_5 V Sense
U
S
_5 V Sense
13
DX- (Data)
DX- (Data) n.c.
B-
Y
14
n.c.
n.c.
Z
Z
15
CLK- (Clock)
n.c.
n.c.
A-
Y
Die digitalen Eingänge „A“ bis „D“ können entweder auf X oder auf Y gelegt werden.
Die digitalen Eingänge „E“ und „F“ müssen auf X (+) und X (-) gelegt werden.
Konfiguration der Jumper J-„A“ für Kanal „A“ und J-„B“ für Kanal „B“
Die Jumper J-„A“ und J-„B“ (1) befinden in der Mitte der Leiterplatte nahe dem Frontblech der Karte. Für jeden Kanal gibt es 2 Jumperreihen, mit
jeweils 20 Pins. Die Standardeinstellung ohne Auswertung der zusätzlichen Eingänge ist in der folgenden Abbildung dargestellt.
I
n der nebenstehenden Abbildung ist das Prinzip der
Jumperkonfiguration dargestellt, es ist für Kanal A und Kanal B
gleich. Die entsprechenden Pin’s der Eingangsbuchsen X41
und X42 sind fest mit den korrespondieren Pin’s der
Jumperreihen verdrahtet. Die nicht konfigurierbaren Pin’s sind
nicht dargestellt. Um die zusätzlichen Eingänge nutzen zu
können, sind folgende Schritte durchzuführen:
•
Stecken Sie die relevanten Jumper um und parametrieren Sie
die IDN P-0-0180Feedback optionsDigital Inputs
„Input
A“ bis „Input D“ auf „used“ oder parametrieren Sie die
IDN P-0-0180Feedback optionsDigital Inputs
„Input E“
bzw.
„Input F“ auf „used“ ohne die Jumper umzustecken.
•
Verdrahten Sie die Encoderleitung entsprechend der Nutzung
der relevanten Eingänge oder stellen Sie einen Adapter her.
Die folgende Tabelle stellt eine Auswahl an Kombinations-
möglichkeiten dar.
Feedback
system
Input
„A“
Input
„B“
Input
„C“
Input
„D“
Input
„E“
Input
„F“
EnDAT
Eingang „A-F“ nicht verfügbar
BiSS
Eingang „A-F“ nicht verfügbar
Hiperface
X
X
Sin / Cos
1V
pp
X
X
X
X
TTL
X
1
X
1
X
2
X
2
X
1
X
2
1)
Es können entweder die Eingänge „A“ und „B“ oder der
Eingang „E“ genutzt werden.
2)
Es können entweder die Eingänge „C“ und „D“ oder der
Eingang „F“ genutzt werden.