BECKHOFF DK9321-0110-0017 Benutzerhandbuch
Seite 5
TwinCAT
Externe Uhren
Application Note DK9321-0110-0017
Dieses Dokument enthält exemplarische Anwendungen unserer Produkte für bestimmte Einsatzbereiche. Die hier dargestellten Anwendungshinweise beruhen auf den typischen
Eigenschaften unserer Produkte und haben ausschließlich Beispielcharakter. Die mit diesem Dokument vermittelten Hinweise beziehen sich ausdrücklich nicht auf spezifische
Anwendungsfälle, daher liegt es in der Verantwortung des Kunden zu prüfen und zu entscheiden, ob das Produkt für den Einsatz in einem bestimmten Anwendungsbereich geeignet
ist. Wir übernehmen keine Gewährleistung, dass der in diesem Dokument enthaltene Quellcode vollständig und richtig ist. Wir behalten uns jederzeit eine Änderung der Inhalte dieses
Dokuments vor und übernehmen keine Haftung für Irrtümer und fehlenden Angaben. Eine detaillierte Beschreibung unserer Produkte enthalten unsere Datenblätter und Dokumen-
tationen, die darin enthaltenen produktspezifischen Warnhinweise sind unbedingt zu beachten. Die aktuelle Version der Datenblätter und Dokumentationen finden Sie auf unserer
Homepage (www.beckhoff.de).
© Beckhoff Automation GmbH, Januar 2010
Die Weitergabe sowie Vervielfältigung dieses Dokuments, Verwertung und Mitteilung seines Inhalts sind verboten, soweit nicht ausdrücklich gestattet.
Zuwiderhandlungen verpflichten zu Schadenersatz. Alle Rechte für den Fall der Patent-, Gebrauchsmuster- oder Geschmacksmustereintragung vorbehalten.
Bestandsanlage
mit Fremdsteuerung
Retrofit mit
Beckhoff-Steuerung
CPU
Beckhoff
CPU
Toggelnder digitaler Ausgang überträgt CPU-Takt der Bestandssteuerung auf die Beckhoff-Steuerung
Fremdsteuerung
PLC
I/O
Drives
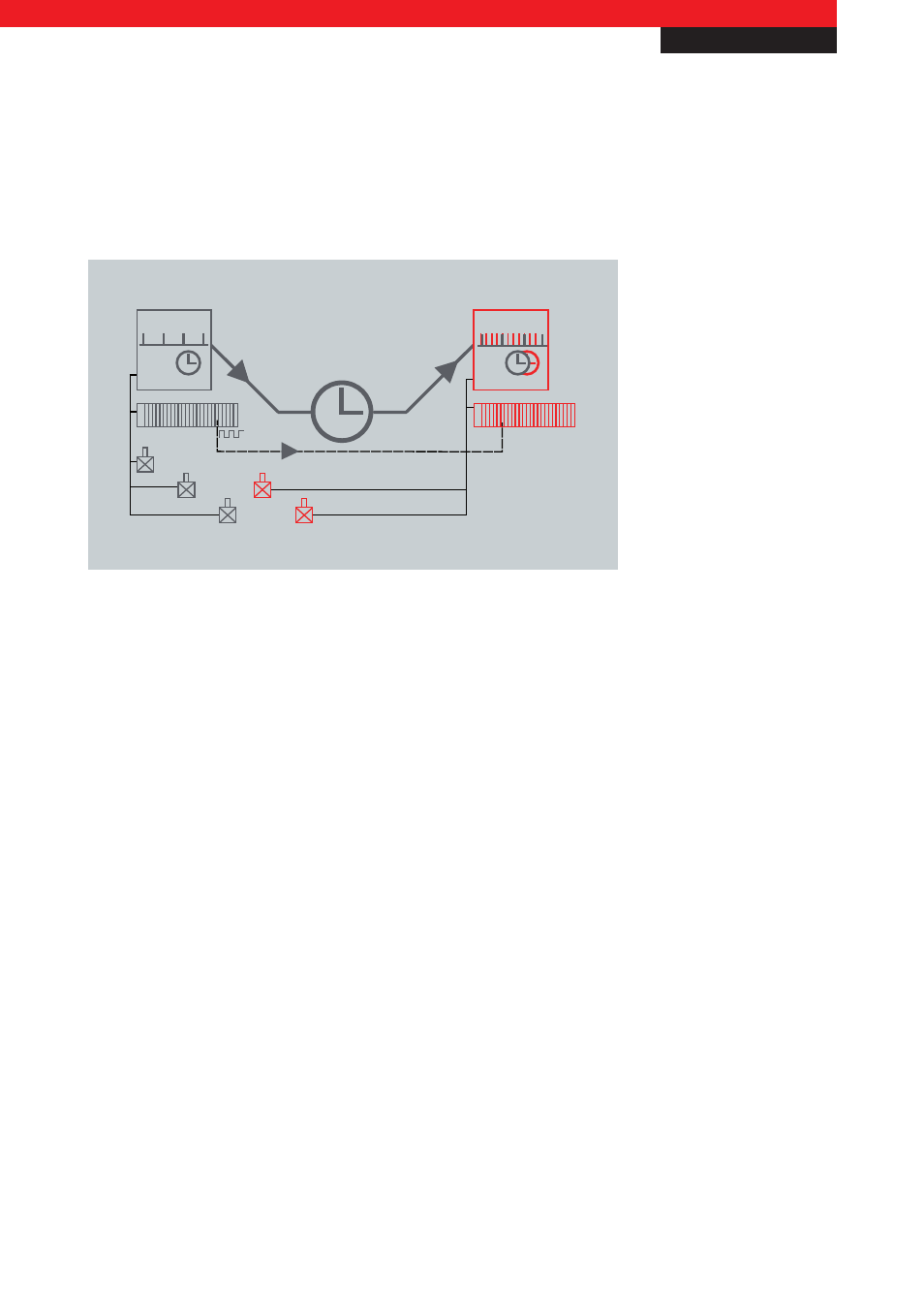
Abb. 3 Retrofit mit CPU-Abgleich
Die links abgebildete Bestandsanlage (grau – Fremdsteuerung) wird einem Retrofit unterzogen, die ursprüngliche Steuerung
soll inklusive Programm erhalten/unverändert bleiben. Die neu hinzugefügten Komponenten (rot – Beckhoff) sind Antriebe
und die dazugehörige Steuerung. Um das somit auf zwei Steuerungen verteilte Motion Control zu synchronisieren, wird in der
Bestandsteuerung ein digitaler Ausgang mit dem CPU-Takt der Bestandssteuerung belegt. Das Signal wird über einen digitalen
Eingang an der ergänzten Steuerung aufgenommen und zur Synchronisierung der eigenen Clock genutzt, um den CPU-Takt der
ergänzten Steuerung auf den der Bestandssteuerung abzugleichen.
– SPS und Motion Control auf dem PC www.beckhoff.de/TwinCAT
– Werkübergreifende Synchronisierung von EtherCAT-Netzwerken www.beckhoff.de/EL6688
– EtherCAT-Bridge-Klemme www.beckhoff.de/EL6692
New Automation Technology
Beckhoff
5