BECKHOFF KL5051 Benutzerhandbuch
Seite 13
Datenaustausch, Funktion
KL5051
13
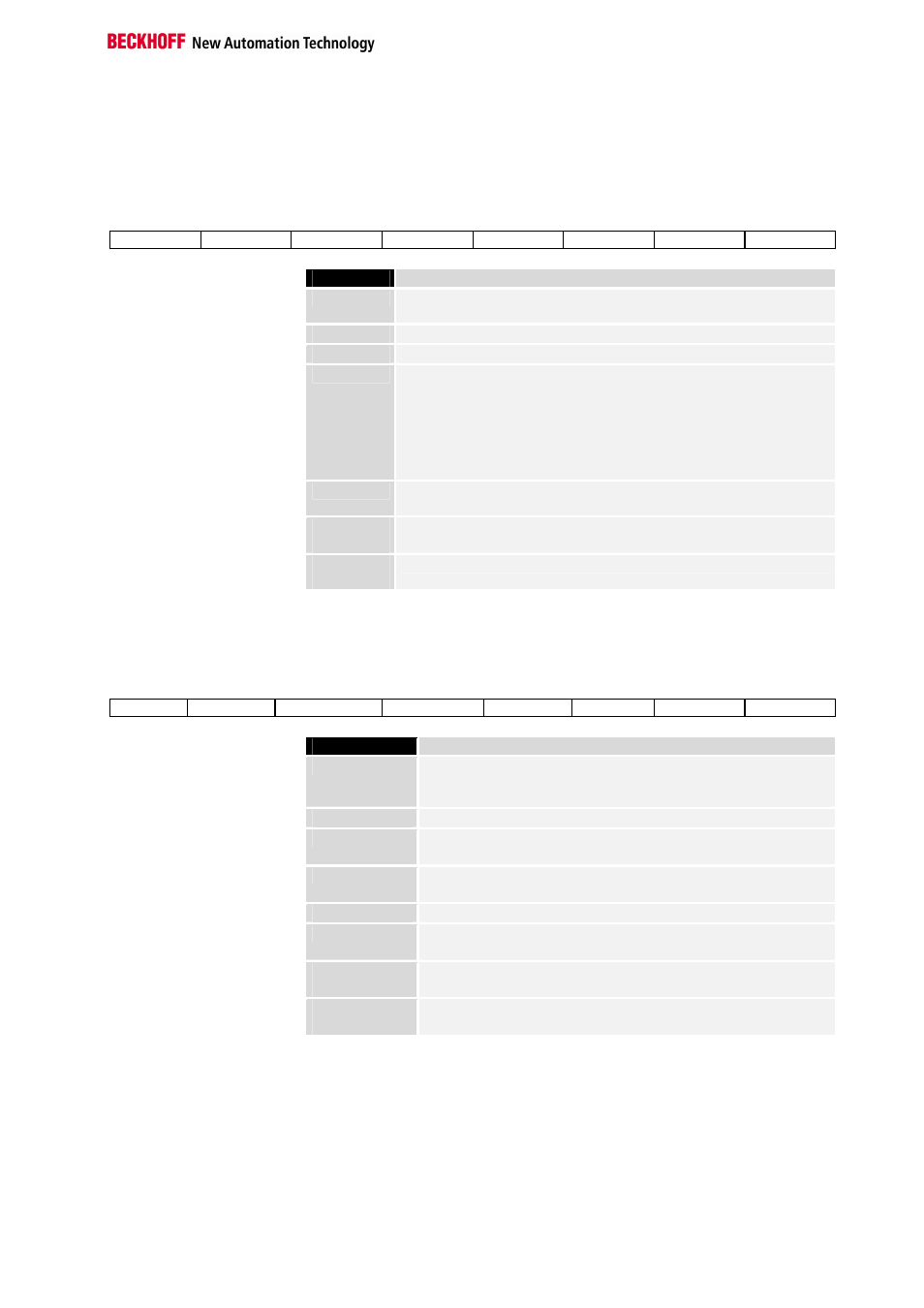
Parameter Control-Byte A3
beim Setzen des Servo
Controls
(Bit 7 = 0)
Mit diesem Control-Byte werden verschiedene Aktionen im Servoverstärker
ausgeführt.
MSB
REG=0
RD_PARH
RD_PARL
RS_ANS
RF
/NSTOP
/PSTOP
Bit
REG
Dieses Bit schaltet zwischen der Servo-Parameter und Servo-
Control/Status Kommunikation um.
RD_PARH
Read Parameter High Word (Parameter Adresse in A4)
RD_PARL
Read Parameter Low Word (Parameter Adresse in A4)
RS_ANS
Reset der Ansprechüberwachung bzw. des Schleppfehlers. Meldet
der Servo einen Fehler, hat z.B. die Ansprechüberwachung zuge-
schlagen, so kann durch das Setzen dieses Bit´s der Fehler zu-
rückgesetzt werden. Wird die Fehlermeldung im Status-Byte E3
(SERV_ERR) nicht zurückgenommen (z.B. Innentemperatur zu
hoch), so muß der Servo spannungsfrei geschaltet werden (nur so
ist das Rücksetzen der übrigen Fehlermeldungen möglich).
RF
Reglerfreigabe. Es erfolgt die Freigabe der Endstufe, gleichzeitig
wird (falls vorhanden) die Bremse freigegeben.
/NSTOP
(aktiv low)
Negative Sollwerte werden auf den Sollwert Null gesetzt.
/PSTOP
(aktiv low)
Positve Sollwerte werden auf den Sollwert Null gesetzt.
Parameter Status-Byte E3
bei der Erfassung des
Servo-Status
Das aktivierte Servo-Status-Word wird fortlaufend vom Servo gelesen und
aktualisiert.
MSB
REG=0
KOM_ERR
RD_PARH_Q
RD_PARL_Q SERV_ERR
RF_Q
/NSTOP_Q
/PSTOP_Q
Bit
REG
0: Der Kanal bestehend aus A3,A4,A5,E3,E4,E5 befindet sich
in der Betriebsart mit der das Servo-Control/Status bedient
wird.
KOM_ERR
Ein Fehler in der Datenübertragung ist aufgetreten.
RD_PARH_Q
In E4,E5 steht das High Word des angeforderten
Parameterwertes.
RD_PARL_Q
In E4,E5 steht das Low Word des angeforderten
Parameterwertes.
SERV_ERR
Das Leistungsteil des Servo meldet einen Fehler.
RF_Q
Die Endstufe und eine evtl. vorhandene Bremse sind
freigegeben.
/NSTOP_Q
(aktiv low)
1: Negative Sollwerte sind möglich.
0: Negative Sollwerte werden auf Null gesetzt.
/PSTOP_Q
(aktiv low)
1: Positive Sollwerte sind möglich.
0: Positive Sollwerte werden auf Null gesetzt.
Parameter Control-Byte A3
in der Parameter
Betriebsart
(Bit 7 = 1)
Die Parameterdaten werden mit der Parameteradresse in einen Zwischen-
speicher geschrieben und auf Anforderung zum Servo übertragen. Diese
Anforderung kann mit dem letzten Buffereintrag erfolgen. Von der Klemme
wird der Datenrahmen gebildet und die Checksumme überprüft und aus-
gewertet. Die Parameterdaten bilden maximal ein Doppelword, es können
jedoch auch kürzere Parameter Daten gesendet werden.