BECKHOFF BK3xx0 Benutzerhandbuch
Seite 53
Hinweise zur Dokumentation
Feldbuskomponenten
51
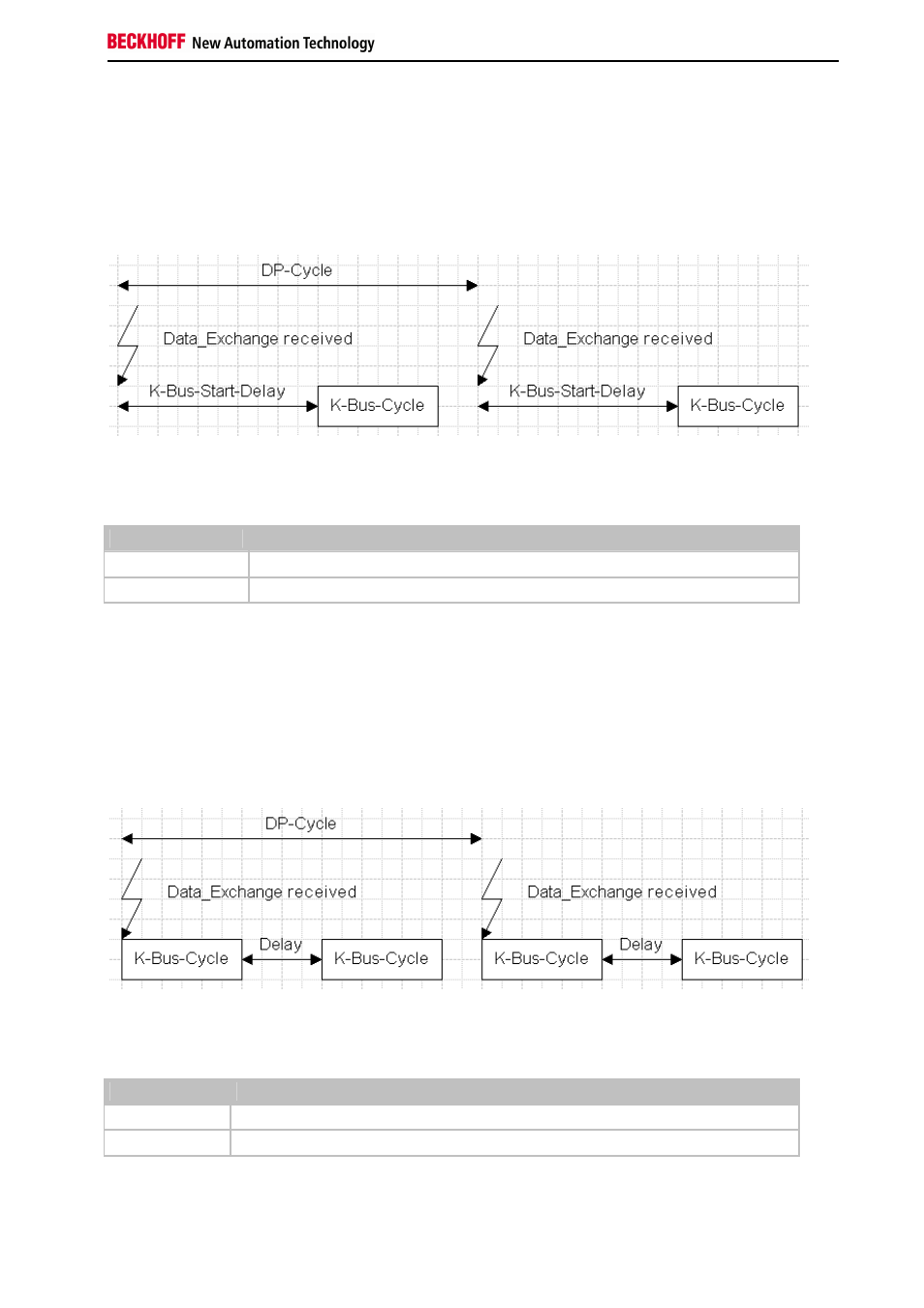
Synchron-Mode mit optimiertem Input-Update (ein Zyklus)
Beim optimierten Input-Update kann der Start des K-Bus-Zyklusses nach dem Empfang des
Data_Exchange-Telegramms verzögert werden, so dass die Inputs aktueller als beim Standard-
Synchron-Mode sind, während die Ausgabe der Outputs stärker verzögert wird. Dabei ist zu beachten,
dass die Dauer des K-Bus-Zyklusses plus die Verzögerungszeit plus ca. 20% (für die niederprioren
Prozesse auf dem Koppler) kleiner als die DP-Zykluszeit (bei TwinCAT die Zykluszeit der zugeordneten
Task) ist.
Die Verzögerungszeit wird über die UserPrmData eingestellt (in µs in Motorola-Format), dazu ist
allerdings die Extended-GSD-Datei des Buskopplers notwendig:
Byte
Wert: Beschreibung
13
Delay-Time (in µs) High-Byte
14
Delay-Time (in µs) Low-Byte
Synchron-Mode mit optimiertem Input-Update (zwei Zyklen)
In der dritten Synchron-Betriebsart sind die Vorteile der anderen beiden Betriebsart kombiniert, es
werden zwei K-Bus-Zyklen innerhalb eines DP-Zyklusses durchgeführt. Der erste Zyklus wird sofort nach
dem Empfang des Data_Exchange-Telegramms vom Master gestartet, daher werden die Outputs so
schnell wie möglich ausgegeben. Der zweite Zyklus wird nach Ablauf einer Verzögerungszeit, die nach
Abschluß des ersten Zyklusses gestartet wird, gestartet, so dass die Inputs möglichst jung sind. Dabei ist
zu beachten, dass zweimal die Dauer des K-Bus-Zyklusses plus die Verzögerungszeit plus ca. 20% (für
die niederprioren Prozesse auf dem Koppler) kleiner als die DP-Zykluszeit (bei TwinCAT die Zykluszeit
der zugeordneten Task) ist.
Die Verzögerungszeit wird über die UserPrmData eingestellt (in µs in Motorola-Format), dazu ist
allerdings die Extended-GSD-Datei des Buskopplers notwendig:
Byte
Beschreibung
13
Delay-Time (in µs) High-Byte
14
Delay-Time (in µs) Low-Byte