Positionierung, Das positionierungssystem – BECKHOFF AL2000 Benutzerhandbuch
Seite 11
Eiserstraße 5 / D-33415 Verl / Telefon 05246/963-0 / Telefax 05246/963-149
11
3. Positionierung
Das Positionierungssystem
Linearmotoranwendungen erfordern eine aufwendige Positions- und Geschwindigkeitsrückmeldung. Ein linea-
rer Geber und ein Servoregler werden im Positionierungssystem aufgenommen. Die Position des Schlittens
wird mittels einer Kombination aus Messstab und Sonde ermittelt. Der lineare Geber meldet diese Information
an den Servoregler zurück.
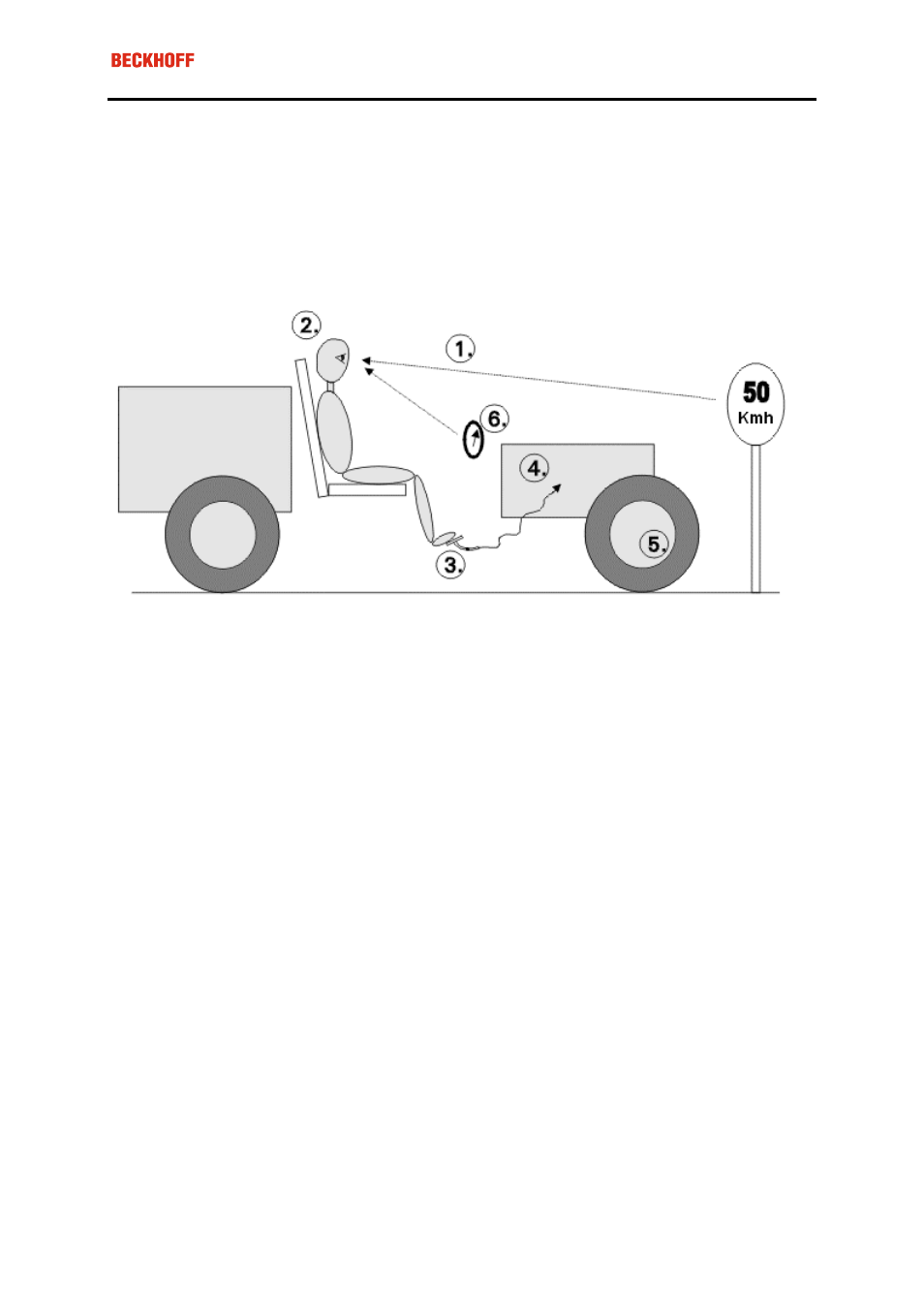
Um eine Idee des Positionierungssystems zu haben, kann ein oberflächlicher Vergleich mit der Geschwindig-
keitsregelung eines Automobils angestellt werden. Die Information des Verkehrsschildes (1) wird erkannt, vom
Fahrer (2) ausgewertet und in eine Anpassung der Stellung des Gaspedals (3) umgesetzt. Dieses führt zu einer
Anpassung der Motorkraft (4) und demzufolge zu einer Anpassung der Drehgeschwindigkeit der Räder (5). Die
tatsächliche Geschwindigkeitsinformation wird dem Fahrer über das Tachometer (6) zurückgemeldet. Solange
die gewünschte Geschwindigkeit nicht erreicht ist, wird diese spezifische Schleifensituation aufrechterhalten.
Im Falle des Linearmotorsystems kann die Messeinheit mit dem visuellen System des Fahrers verglichen wer-
den. Die Messsonde erkennt die Position und der lineare Geber übersetzt sie in die korrekte Positionsinformati-
on. Die Eingangsanschlüsse des Servoreglers agieren wie die Augennerven. Hier wird die Positionsinformation
an das Gehirn des Fahrers, den eigentlichen Servoregler, zurückgegeben. In diesem Regler wird diese Infor-
mation verarbeitet und in ein entsprechendes Spannungssignal an den Linearmotor, vergleichbar mit der Gas-
pedalbewegung, umgesetzt. Weil der Linearmotor einen leistungsstarken Eingang erfordert, wird dieses Signal
von einem Verstärker zur Verfügung gestellt. Ein größerer Verstärker liefert eine höhere Spitzenkraft, genau
wie ein leistungsstärkerer Motor mehr Pferdestärken erzeugt. Ähnlich wie im Falle der Automobildynamik hängt
die Beschleunigung des Linearmotors von dem Verhältnis der Verstärkerleistung und der gesamten bewegli-
chen Last ab. Es sollte darauf hingewiesen werden, dass das Spannungssignal an einen Linearmotor in Form
von Impulsen mit einer festgelegten Schalthäufigkeit und einer festgelegten Spannung geliefert werden. Dem-
zufolge ist die Impulsdauer der zu regelnde Parameter.
Die von der Sonde gelieferte Positionsinformation ist inkremental. Also muss der Linearmotor ohne die absolute
Position des Schiebers auskommen. Dies kann insbesondere beim Start des Motorbetriebs problematisch sein.
Aus diesem Grund wird der Schieber für einige minimale Testbewegungen aktiviert. Diese ‚magnetische Aus-
richtung’ stellt dem Positionierungssystem die erforderliche Information zur Verfügung.