Und cos – BECKHOFF DK9221-1211-0053 Benutzerhandbuch
Seite 4
EtherCAT
Positionierung
Application Note DK9221-1211-0053
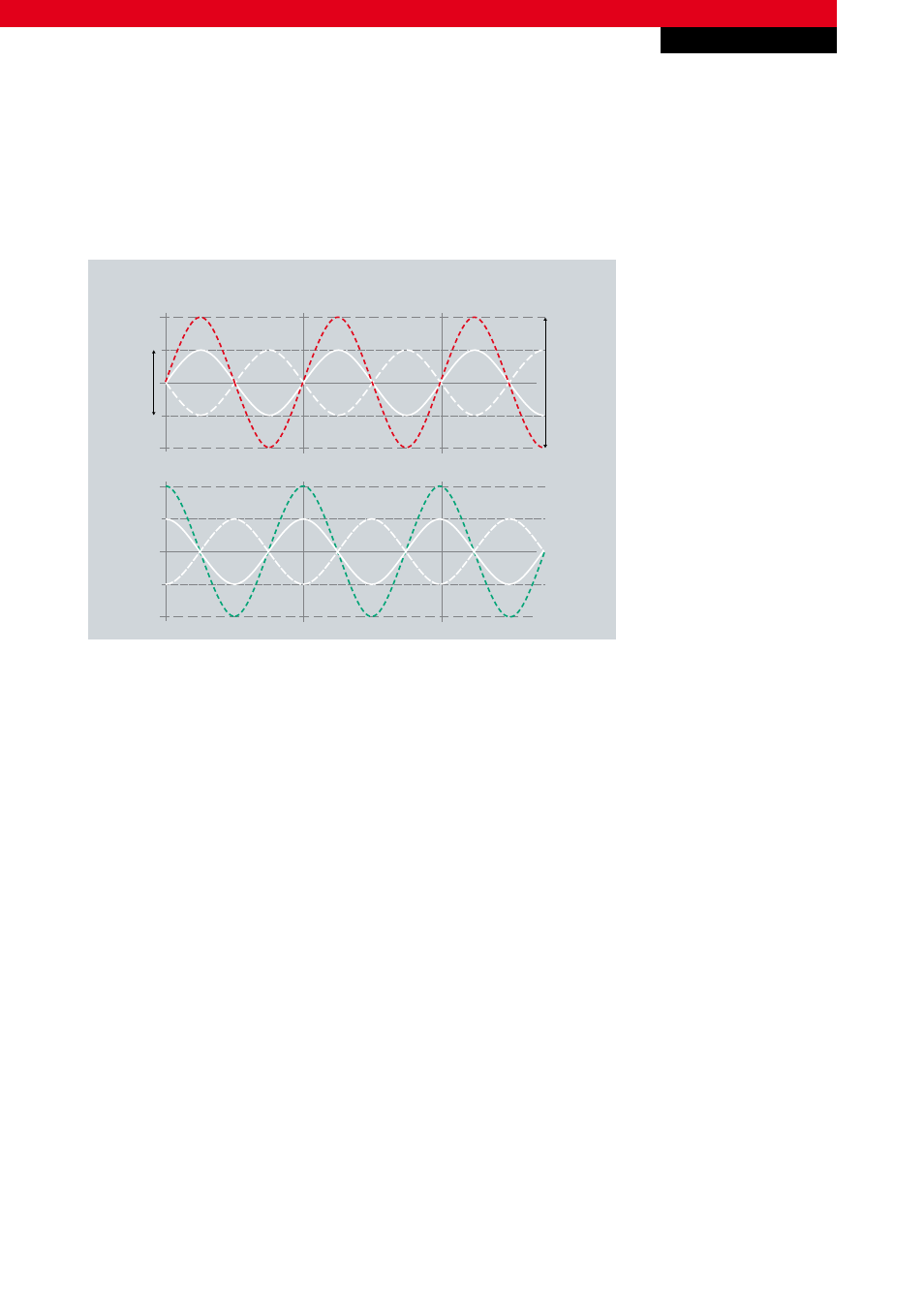
Bildung des Differenzsignals zur Störungsvermeidung
U
SS
=
1 V
SinP
SinN
SinDiff = SinP - SinN
U
SS
=
0,5 V
SinDiff
CosP
CosN
CosDiff = CosP - CosN
CosDiff
Abb.4 Bildung des Differenzsignals
Andere mögliche Spannungspegel von SinCos-Gebern reichen vom mV-Bereich bis hin zu mehreren Volt. Geber mit
Stromschnittstelle haben typischerweise einen Pegel von 11 µA
SS
bei 1 kOhm Last. Weiterhin typisch bei inkrementellen Gebern
sind auch rechteckförmige Ausgangssignale mit 5 V TTL oder auch 30 V HTL, die wiederum nicht potentialfrei sind, sondern
Bezug zur Masse haben.
Die Leistungsdaten eines Encoders liegen üblicherweise bei 100…10.000-SinCos-Perioden je Umdrehung. Die Drehbewegung
der Welle definiert sich somit aus einer Mehrzahl von Positionsinformationen, aus denen die Folgeelektronik im ersten Schritt
eine grobe Positionsbestimmung durch Zählung der Pulse bzw. Halbwellen ermittelt. Im zweiten Schritt werden die beiden
momentanen Amplitudenwerte der Kanäle A und B (Sin
Diff
und Cos
Diff
) durch lineare Interpolation mathematisch zueinander ins
Verhältnis gesetzt. Damit liegt auch innerhalb einer Halbwelle die aktuelle Winkellage des Amplitudenverlauf (0…360°) vor.
Somit wird bei SinCos-Signalen, im Gegensatz zu rechteckigen TTL-Signalen, eine nochmals höhere Ortsauflösung erreicht.
Durch diese Form der Impulsvervielfachung lässt sich eine Maximierung der mechanischen Auflösung des Drehgebers erzielen,
so dass auch bei sehr langsamen Bewegungen ausreichende Informationen zur Positionsbestimmung vorliegen. Gängige
Interpolationsraten liegen oft bei 4…8 Bit.
New Automation Technology
Beckhoff
4
Anwendungshinweise siehe Disclaimer auf der letzten Seite