Auflösung, Rampenfunktion, Fahrwegsteuerung – BECKHOFF KL2521-0000 Benutzerhandbuch
Seite 7
Funktionsbeschreibung
KL2521
5
Auflösung
Die Grundfrequenzen werden mit einer Auflösung von 1 Hz pro Bit
vorgegeben (GF1: Register 36, 37 bzw. GF2: Register 38, 39). Die
Klemme arbeitet intern bei 16 MHz mit einer Auflösung von 32 Bit. Das
entspricht einer theoretischen minimalen Schrittweite von 0,0037 Hz/Schritt
über den gesamten Frequenzbereich. Über die Ausgangsstufe kann eine
Frequenz von maximal 500 kHz ausgegeben werden.
Rampenfunktion
Die Klemme bietet die Möglichkeit des sanften Hoch-/Herunterfahren.
Durch Register 40 kann die Rampensteilheit für das Hochfahren mit einer
Genauigkeit von 10 bzw. 1000 Hz/Sec (Feature.6) eingestellt werden.
Register 41 hat die gleiche Funktion für das Herunterfahren. Das
Prozessdatum kann während einer Rampenfahrt (Status.2) geändert
werden, die Klemme nimmt dann den neuen Wert als Zielfrequenz.
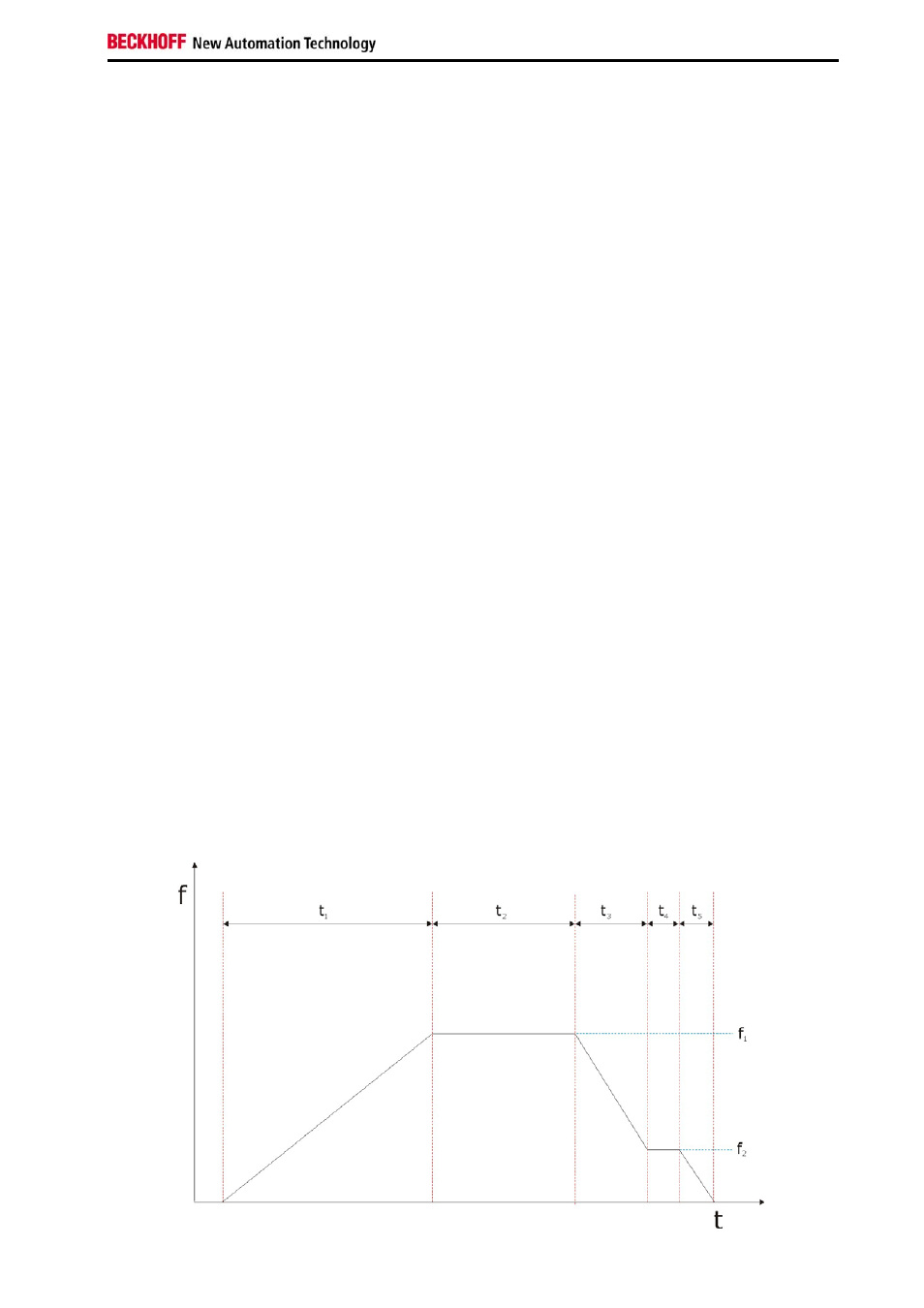
Fahrwegsteuerung
Ist die Funktion ‚Fahrwegsteuerung’ aktiviert (Feature.9), wird bei
steigender Flanke an Control.2 ein fester Zählerwert angefahren, dieser
muss zuvor in Register 0 (Low-Word) und Register 1 (High-Word) zur
Laufzeit eingetragen werden. Die Zeit t
1
ist durch die Rampen-
Zeitkonstante in Register 40 bestimmt. t
2
wird mit der maximalen Frequenz
f
1
(Register 2) durchfahren. Die Zeit t
3
ist durch die Rampen-Zeitkonstante
in Register 41 bestimmt, mit der auf die Auslauf-Frequenz f
2
(Register 43)
gefahren wird. Ist der vorgegebene Zählerstand erreicht, schaltet die
Klemme die Frequenz auf Null. Vorraussetzung für eine exakte Zielfahrt ist,
dass die Zeitkonstante der fallenden Rampe um einen gewissen Faktor
größer ist, als die der steigenden Rampe. Dies ist erforderlich, damit die
Auslauf-Frequenz vor dem Endzählerstand erreicht wird und die Klemme
nicht mit voller Geschwindigkeit auf den Endpunkt fährt.
Zu Erläuterung: Die KL2521 berechnet aus der Zeit t
1
und der Anzahl der
gefahrenen Schritte die noch zu fahrenden Schritte in der Zeit t
2
. Die
Berechnung geht für das Herunterfahren von der gleichen Anzahl von
Schritten aus wie für das ermittelte Herauffahren. Der Herunterfahrrampe
muss etwas steiler sein, ca. 10%, damit es möglich ist in der verbleibenden
Zeit t
3
+ t
4
+ t
5
das Ziel exakt zu erreichen. Dieser Zusammenhang
verändert sich mit der maximalen Frequenz.