BECKHOFF DK9321-1109-0009 Benutzerhandbuch
Seite 3
TwinCAT
TwinCAT Supplement „Kinematic Transformation“
Application Note DK9321-1109-0009
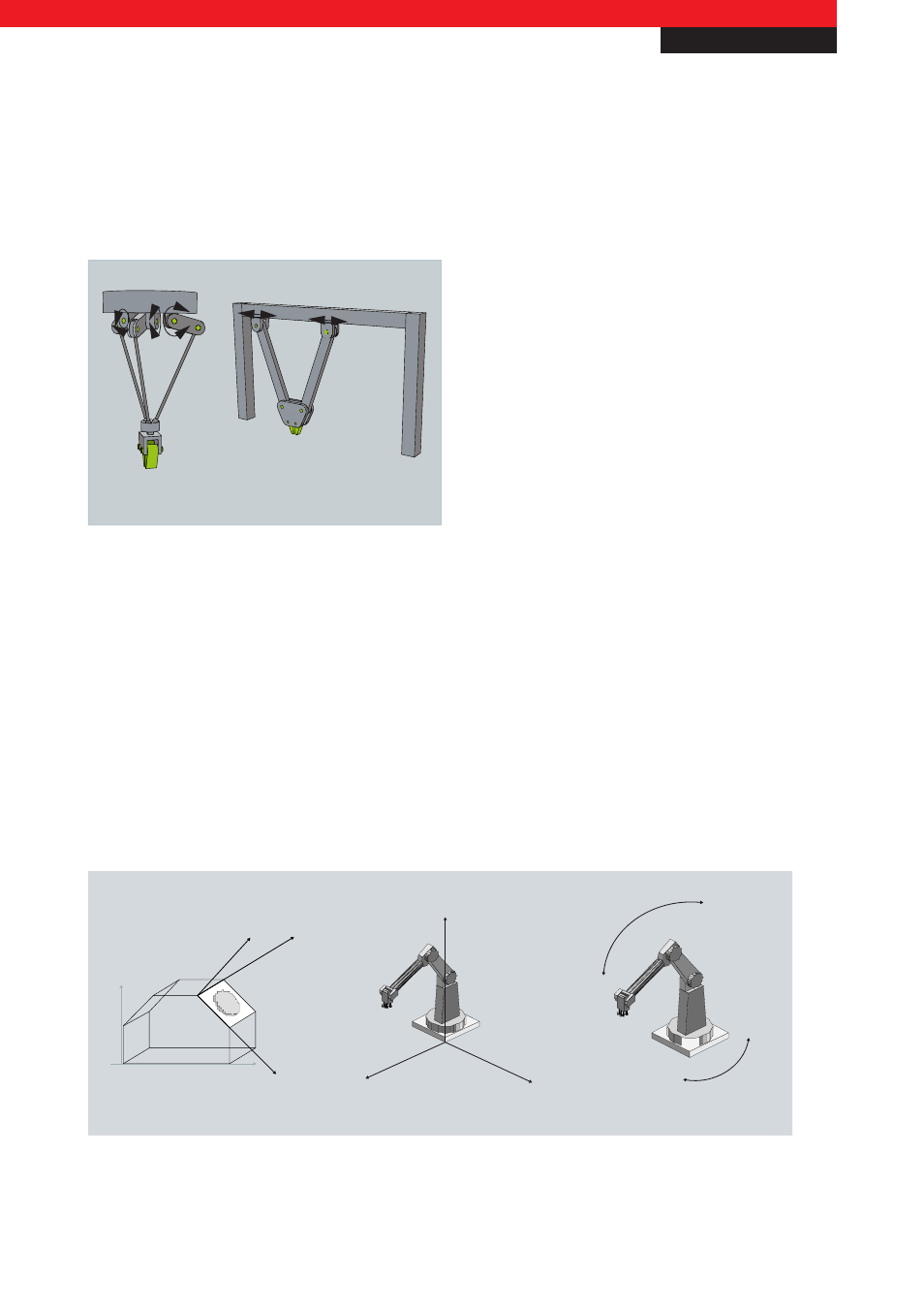
Delta-Kinematik
Scheren-Kinematik
Abb. 2 Beispiele für parallele Kinematiken: Delta- und Scheren-Kinematik
Koordinatensysteme
FürdieBeschreibungdesPositionierverhaltenseinesSystemsbenötigtmanKoordinatensysteme.DieseKoordinatensysteme
werdenindieeinzelnenaktivenGelenkachsengelegt.Mankannhierfürz.B.kartesischeKoordinatensystemeheranziehen.
DiesewerdendannsoandieeinzelnenKörpergebunden,dasseineDrehungoderTranslationumbzw.inRichtungder
Koordinatenachsenerfolgt.
KartesischesKoordinatensystem:
–rechtshändig
–Rotationsrichtungenimmerpositiv(gegendenUhrzeigersinn)
ZurProgrammierungkönnenunterschiedlicheKoordinatensystemealsGrundlagegenutztwerden:
PCS
MCS
ACS
Abb. 3 Koordinatensysteme, die zur Programmierung hergezogen werden können
New Automation Technology
Beckhoff
3
AnwendungshinweisesieheDisclaimeraufderletztenSeite