Typische kinematiken – BECKHOFF DK9321-1109-0009 Benutzerhandbuch
Seite 5
Advertising
TwinCAT
TwinCAT Supplement „Kinematic Transformation“
Application Note DK9321-1109-0009
x
MCS
y
MCS
y
PCS
P
f
1
f
2
f
1
f
2
x
MCS
y
MCS
x
PCS
y
PCS
x
PCS
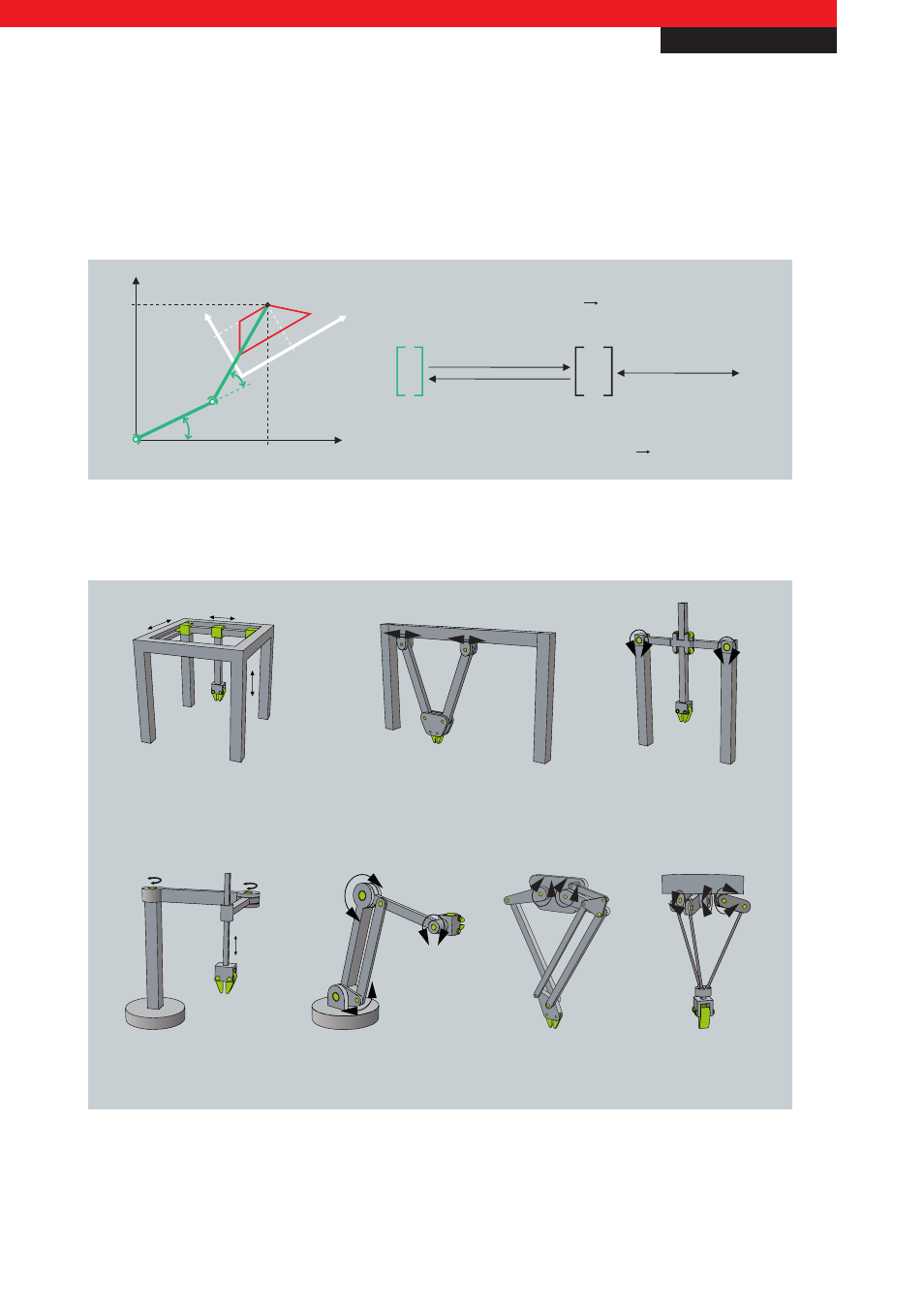
Vorwärtstransformation
Rückwärtstransformation
Kartesische Transformation
Direktes kinematisches Problem (KP)
Vorwärtstransformation: Gelenkwinkel Position + Orientierung
Inverses kinematisches Problem (IKP)
Rückwärtstransformation: Position + Orientierung Gelenkwinkel
Abb. 5 Unterschiedliche kinematische Problemstellungen
Typische Kinematiken
Kartesisches Portal
SCARA
2-D-Parallelkinematik
3-D-Delta-Kinematik
Scherenkinematik
2-D-Kinematik
Rollenkinematik (H-Bot)
Abb. 6 Übersicht der Kinematiken
New Automation Technology
Beckhoff
5
AnwendungshinweisesieheDisclaimeraufderletztenSeite
Advertising