Transformation – BECKHOFF DK9321-1109-0009 Benutzerhandbuch
Seite 4
TwinCAT
TwinCAT Supplement „Kinematic Transformation“
Application Note DK9321-1109-0009
Werkstück-Koordinaten-System(PCS–PieceCoordinateSystem)istunabhängigvonderverwendetenKinematikundwird
bevorzugtangewendet.AuchdasMaschinen-Koordinaten-System(MCS–MachineCoordinateSystem)istunabhängigvon
derverwendetenKinematik.DasAchs-Koordinaten-System(ACS–AxisCoordinateSystem)istabhängigvonderverwendeten
KinematikundwirdfürReferenzierungbzw.Homingeingesetzt.
DieProgrammierungderRobotererfolgthäufigimPCSoderMCS,dabeideSystemedurchdenkartesischenAufbausehr
anschaulichsind.ZusätzlichmussdieArtderKinematikindiesenSystemennichtberücksichtigtwerden,dadurcheine
TransformationdieentsprechendenBewegungsabläufeberechnetwerden.ImGegensatzdazumussbeiderProgrammierung
inACSderAufbauderAchsenunbedingtberücksichtigtwerden,dadirektdieBewegungsbefehlederAchsenprogrammiert
werdenmüssen.DaherwirddieseArtderProgrammierungnurinAusnahmefällenverwendet,z.B.beimHoming.
Transformation
DieKinematikbeschreibtdieUntersuchungderBewegungsmöglichkeitendereinzelnenGliederdesRobotersrelativ
zueinander.EswerdendieauftretendenGeschwindigkeitenundBeschleunigungenbeiderBewegungderGelenke
berücksichtigt,jedochnichtdieauftretendenKräfteunddieAntriebsartdesGelenks(aktiv/passiv).Eineunterschiedliche
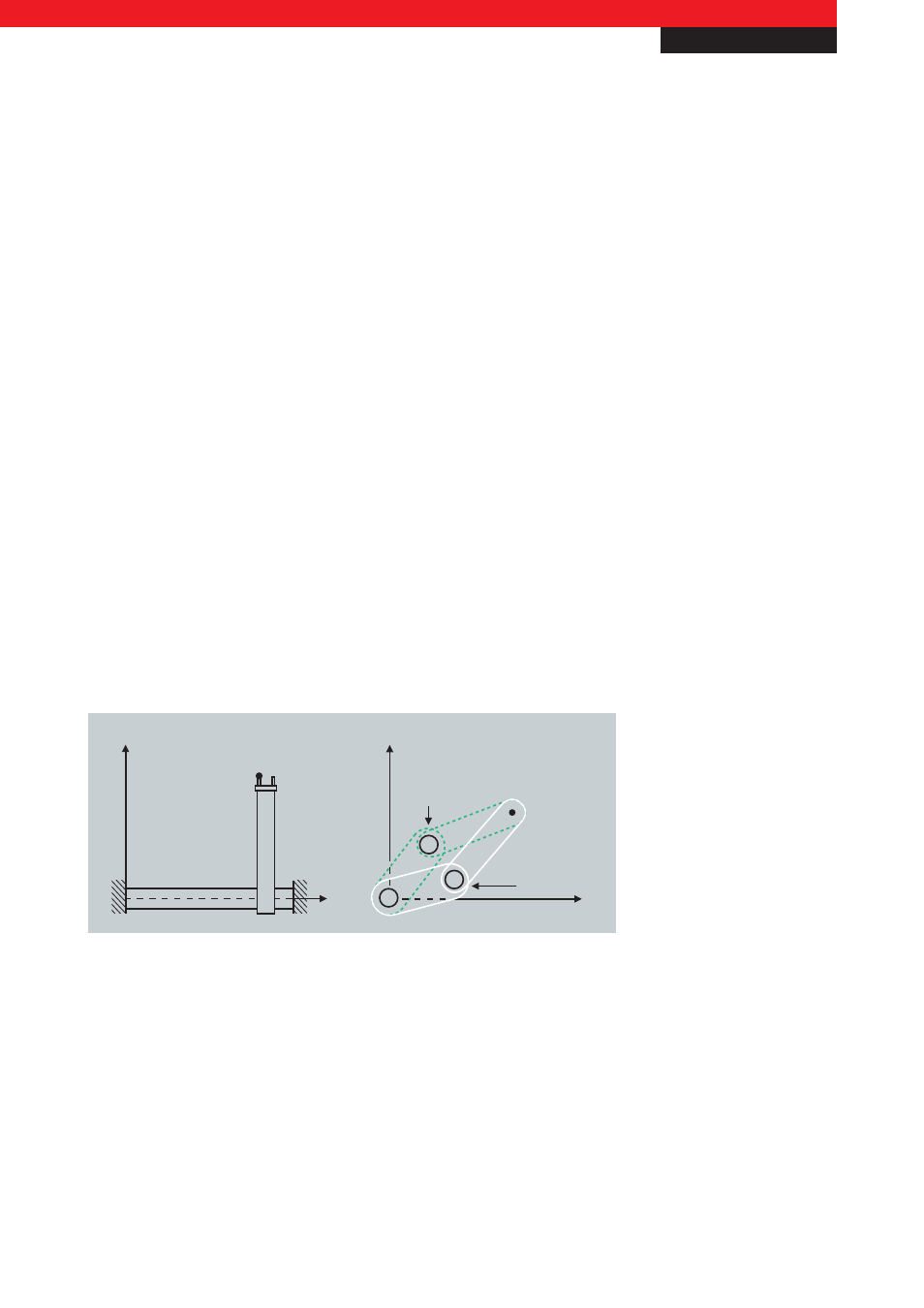
AnordnungvonGelenkenundGliedernkanndieidentischeBewegungsbahndesTCPerzeugen(vgl.Abb4).
TCP
TCP
Gelenk unten
Gelenk oben
x
x
y
y
Abb. 4 Identische TCP-Bewegung mit unterschiedlichen Mechaniken umsetzbar
DieTransformationbeschreibtimZusammenhangderKinematikdienotwendigeBerechnung,umvoneinem
Koordinatensystemineinandereszuwechseln.BeiderBetrachtungvonKinematikenvonRoboternstellensichgrundsätzlich
zweiProbleme.Dasdirekte kinematische Problem(KP),auchalsVorwärtstransformationbezeichnet,behandeltdie
BerechnungderLagedesTool-Center-Points(TCP)inraumfestenKoordinatenausdenachsspezifischenGelenkkoordinatendes
Roboters.Beideminversen kinematischen Problem(IKP),auchalsinverseTransformationbezeichnet,handeltessichum
dieUmkehrrelation,beidemausderLagedesTCPsdieachsspezifischenGelenkkoordinatenzubestimmensind.DieAufgabe
einerTransformationbestehtdarin,PositionundOrientierungderObjektezueinandersozuverändern,dassderTCPdie
gewünschtenBewegungsbahnenabfährt.
New Automation Technology
Beckhoff
4
AnwendungshinweisesieheDisclaimeraufderletztenSeite