BECKHOFF DK9321-1109-0009 Benutzerhandbuch
Seite 8
TwinCAT
TwinCAT Supplement „Kinematic Transformation“
Application Note DK9321-1109-0009
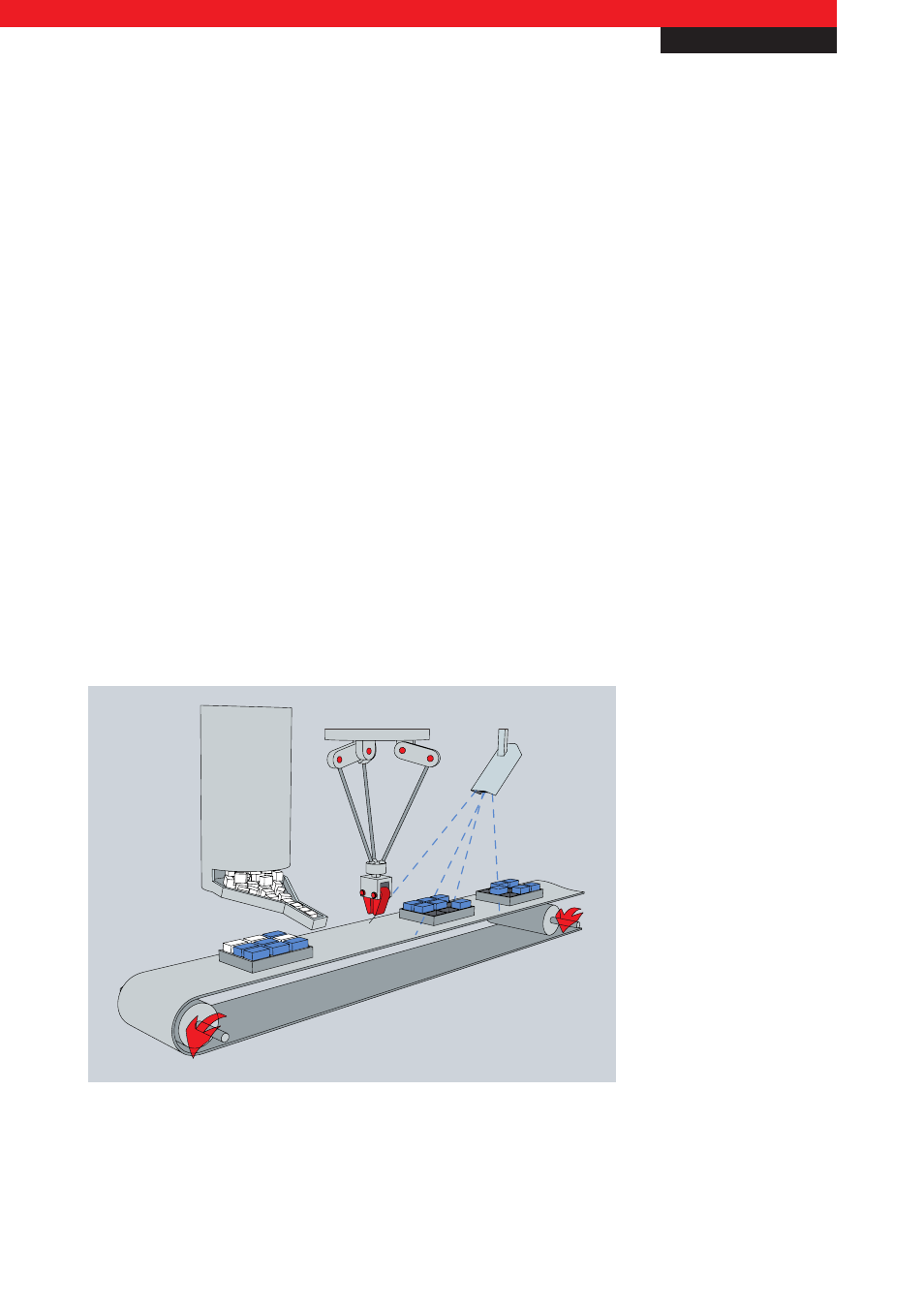
DieAufgabedeshiervorgestelltenProduktesistnun,ausdenPositionenundGeschwindigkeitenderFörderbänderund
denDatendesVision-SystemsdenBewegungsbefehlsozuberechnen,dassderRoboterdasObjektzielgenaugreift,
denvorgegebenenFahrwegzurücklegtunddasObjektwiederumzielgenauaufdemanderenFörderbandablegt.Dazu
synchronisiertsichderRoboteraufdenAntriebdesFörderbandesaufundfährtmitdemFörderbandmit,umindieoptimale
Aufnahme-Positionzugelangen.SobaldderRoboterdasObjektaufgenommenhat,koppeltersichvomAntriebdes
Förderbandesab,umaufdasandereFörderbandzuwechseln.DasAblegenerfolgtnachdemgleichenPrinzip:DiePositionwird
durchdieSteuerungvorgegeben,derRobotersynchronisiertsichauf,fährtmitundpositioniertdasObjektoptimalzurAblage.
JereibungsloserdieAbstimmungdereinzelnenKomponentenaufeinanderist,umsoschnellerkannderAblaufausgeführt
werden.
EinweitererEinsatzbereichvonDelta-RoboternistdasAuffüllenvonlückenhaftenObjektträgernnachderQualitätssichtung:
NichtvollständigbefülltePaketemit3x3-TeilensollenvoneinemRoboterinVerbindungmiteinemVision-Systemsobefüllt
werden,dassdiePaketevollständigsind.ÜberdiePositionserfassungerhältderRoboterdieKoordinaten,andenenkeinTeil
vorhandenist.AuseinerchaotischenAnordnungvonzugeführtenObjektengreiftderRobotereinsauf,synchronisiertsichauf
dasTransportbandundplatziertesentsprechendderKoordinatenindieLücke.
Abb. 9 Fehlteilerkennung und –auffüllung
DerRobotermussdreiObjekteplatzieren,dahermusseineBearbeitungsreihenfolgefestgelegtwerden,umzugewährleisten,
dassderObjektträgerinnerhalbdesArbeitsraumsdesRobotersvollständigbestücktwird.DerRoboternimmteinObjektauf,
synchronisiertsichundplatziertes.
New Automation Technology
Beckhoff
8
AnwendungshinweisesieheDisclaimeraufderletztenSeite