BECKHOFF DK9321-1109-0009 Benutzerhandbuch
Seite 6
TwinCAT
TwinCAT Supplement „Kinematic Transformation“
Application Note DK9321-1109-0009
Supplement „Kinematic Transformation“
DasSupplementsetztaufTwinCATNCIfürinterpolierendeBewegungenundG-Code(DIN66025)aufundistprimärfür
P&P-Anwendungenentwickelt.EslassensichaberauchStandardPTP-undKurvenscheiben-Anwendungenrealisieren.Alle
NC-PTP-Eigenschaften,wieKurvenscheiben,fliegendeSägeundNCI,könnenbeliebigmitderRoboterbewegungkombiniert
werden.DieProgrammierungderZielkoordinatenerfolgtdabeibequemimkartesischenKoordinatensystem.ZurBerechnung
desSchleppfehlersundderSchwingungsneigungwirdeineStromvorsteuergrößeausdemdynamischenModulberechnet.
SämtlicheVor-undRückwärtstransformationenwerdenvomTwinCAT-Kinematic-Transformation-Moduldurchgeführt.
DasProduktunterstütztderzeitverschiedeneparalleleundauchserielleKinematikenundistdaherfürunterschiedlichste
Anwendungsfeldergeeignet.DieAuswahlderKinematikerfolgtkomfortabelimTwinCATSystemManager.Dortwerden
imKinematikkanal–nebendemTyp(z.B.Delta)–auchdieStablängenundderenVersätzeparametriert.Füreine
StromvorsteuerungmüssenMassenundMassenträgheitenangegebenwerden.
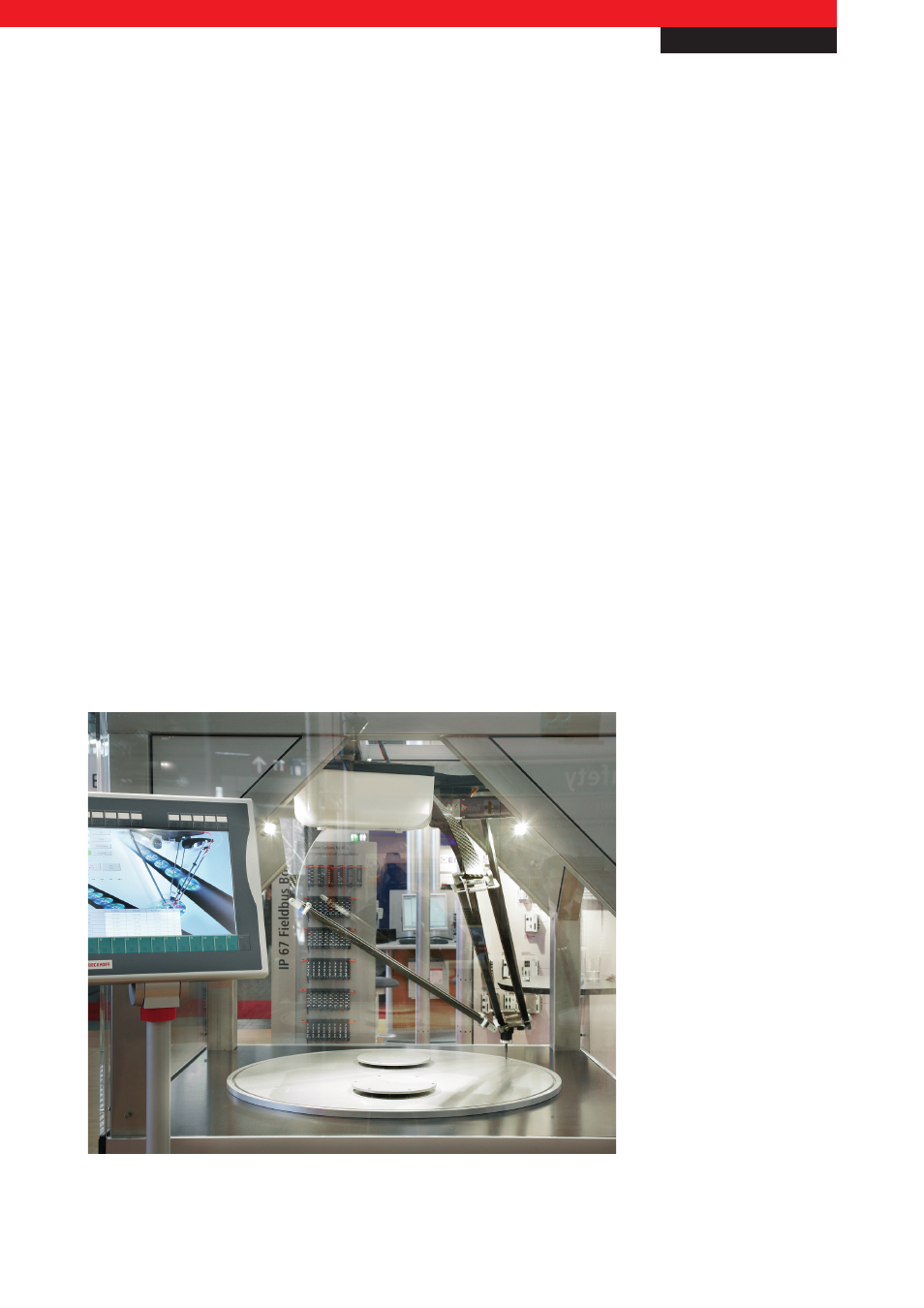
UmSynchronitätunddieDynamikvonRoboter-Anwendungenzuverdeutlichen,hatBeckhoffzurProduktpräsentationdes
SupplementsaufderHannoverMesse2009eine3-D-Delta-KinematikimEinsatzgezeigt.
http://www.beckhoff.de/TwinCAT-Kinematic-Transformation
Abb. 7 Präsentation des Supplements auf der Hannover Messe 2009 mit 3-D-Delta-Kinematik
New Automation Technology
Beckhoff
6
AnwendungshinweisesieheDisclaimeraufderletztenSeite