BECKHOFF DK9321-1109-0009 Benutzerhandbuch
Seite 7
TwinCAT
TwinCAT Supplement „Kinematic Transformation“
Application Note DK9321-1109-0009
DervorgestellteRoboteristmitStandard-KomponentenausdemProduktspektrumvonBeckhoffausgerüstet;alsAntriebesind
dieServoverstärkerderBaureiheAX5000verbaut.MotorenundGetriebesindebenfallsBeckhoff-Komponenten.Softwareseitig
basiertderRoboteraufdemTwinCAT-NC-I-PaketinKombinationmitdemSupplementKinematicTransformation.
DiedynamischenEigenschaftendesRobotersermöglichenfürP&P-ApplikationeneinweitesEinsatzfeld:Mit
Bahngeschwindigkeitenvonbiszu7m/sundBeschleunigungenvonbiszu9gsynchronisiertsichderRoboteraufeine
Kurvenscheibeauf,fährtdortentsprechendeBahnenabundkoppeltsichwiederab.DasSupplementspiegeltjedochdie
VielseitigkeitderindustriellenRoboter-IntegrationwiederundistdahernichtnurfürP&Pgeeignet.
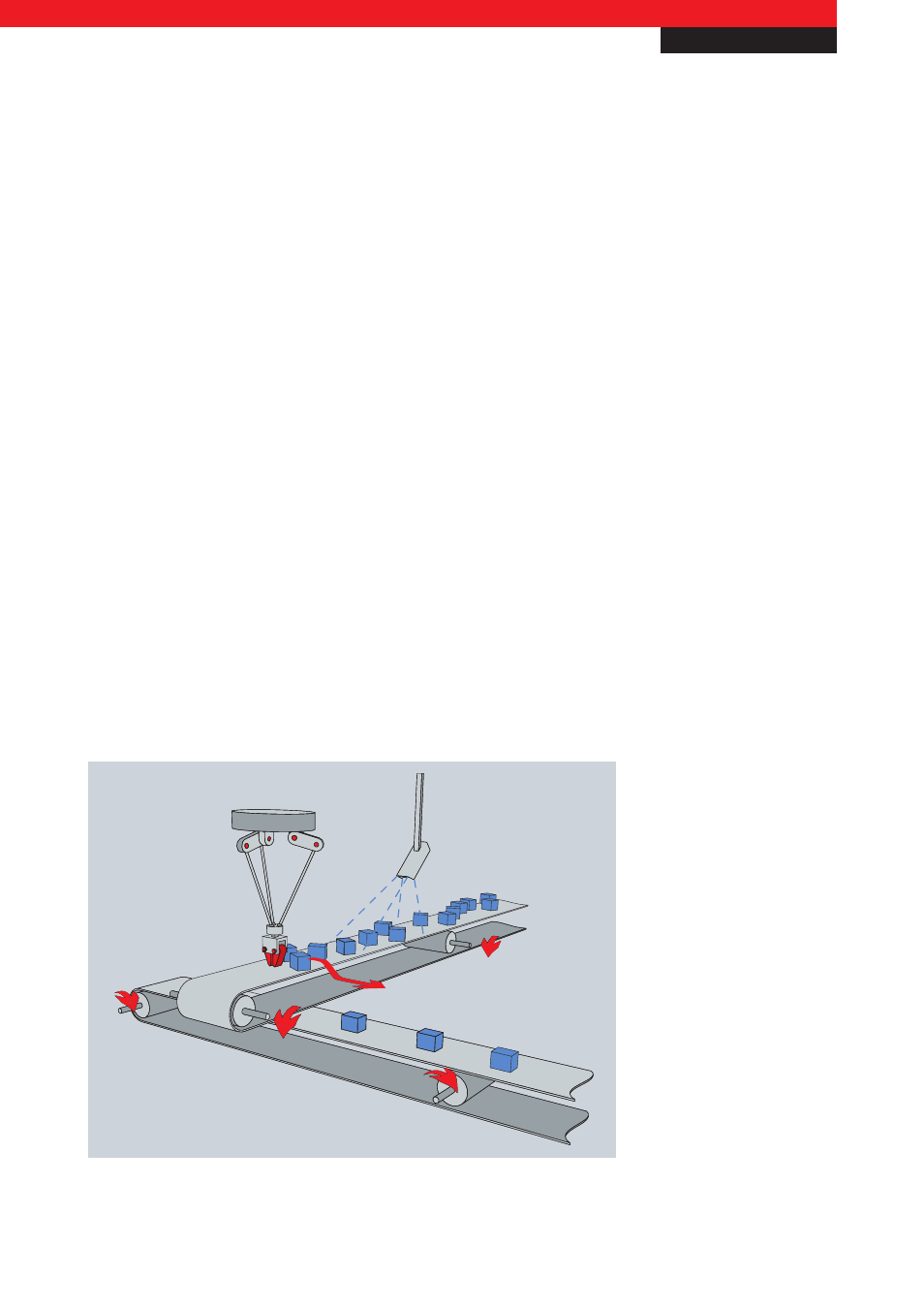
Praxisbeispiel P&P-Anwendung: 3-D-Delta-Roboter | Vision-System – Synchronisation mit
Förderbändern
EinetypischeAnwendungfürDelta-KinematikenisteineP&P-Anwendung.TeilesollenvoneinemFörderbandabgenommen
undaufeinweiteresFörderbandgelegtwerden.EinVision-SystemerkennthierbeidieLageunddieOrientierungderTeile.
Voraussetzungistnatürlich,dassdieFörderbänderbeideimArbeitsraumdesRobotersliegen.DieBewegungsrichtungder
Bänderistbeliebig:Siekanngleichläufigodergegenläufigsein.
MitflexiblenVision-SystemenkannoftaufVereinzelerverzichtetwerden–eineVorsortierungentfällt.DasVision-Systemistvor
demRoboterplatziertundbestimmtPositionundLagedesMaterials.DieermitteltenKoordinatenwerdenandieSteuerung
weitergegeben.AusdiesenKoordinatenwerdendieAufnahme-undAblagepositionjedeseinzelnenObjektesbestimmt.Der
‚FliegendeSäge‘-AlgorithmusberechnetjetztdieSynchronposition,anderderRoboterunddasTeilaufeinandertreffen.
Abb. 8 Vereinzelung: Aus „chaotischer“ Anordnung heraus werden die Teile zur Weiterverarbeitung von einem Förderband auf ein
zweites umsortiert.
New Automation Technology
Beckhoff
7
AnwendungshinweisesieheDisclaimeraufderletztenSeite