3 flansch, 4 schutzart, 5 isolierstoffklasse – BECKHOFF AM8100 Benutzerhandbuch
Seite 16: 6 schwinggüte, 7 vibrationen und schocks, 8 anschlusstechnik
Technische Beschreibung
Radialkraft
Treiben die Motoren über Ritzel oder Zahnriemen an, so treten hohe Radialkräfte auf. Die zugelassenen
Werte am Wellenende, abhängig von der Drehzahl, entnehmen Sie den Diagrammen in Kapitel Technische
Daten [
27]. Benutzen Sie bitte das Programm zur Berechnung der Kräfte auf unserer Homepage für die
exakte Berechnung der Radialkräfte.
Axialkraft
Bei der Montage von Ritzel oder Riemenscheiben auf die Welle und bei Betrieb von z.B. Winkelgetrieben
treten Axialkräfte auf. Benutzen Sie bitte das Programm zur Berechnung der Kräfte auf unserer Homepage
für die exakte Berechnung der Axialkräfte.
Kupplung
Als ideale spielfreie Kupplungselemente haben sich doppelkonische Spannzangen, eventuell in Verbindung
mit MetallbalgKupplungen, bewährt.
6.3.3
Flansch
Flanschmaße nach IECNorm, Passung j6 (h7 bei AM811x), Genauigkeit nach DIN 42955
Toleranzklasse : N
6.3.4
Schutzart
Standardausführung Gehäuse
IP65 (IP54 = AM811x)
Standardausführung Wellendurchführung
IP54
Wellendurchführung mit Wellendichtring
IP65
6.3.5
Isolierstoffklasse
Die Motoren entsprechen der Isolierstoffklasse F nach IEC 60085 (UL1446 class F).
6.3.6
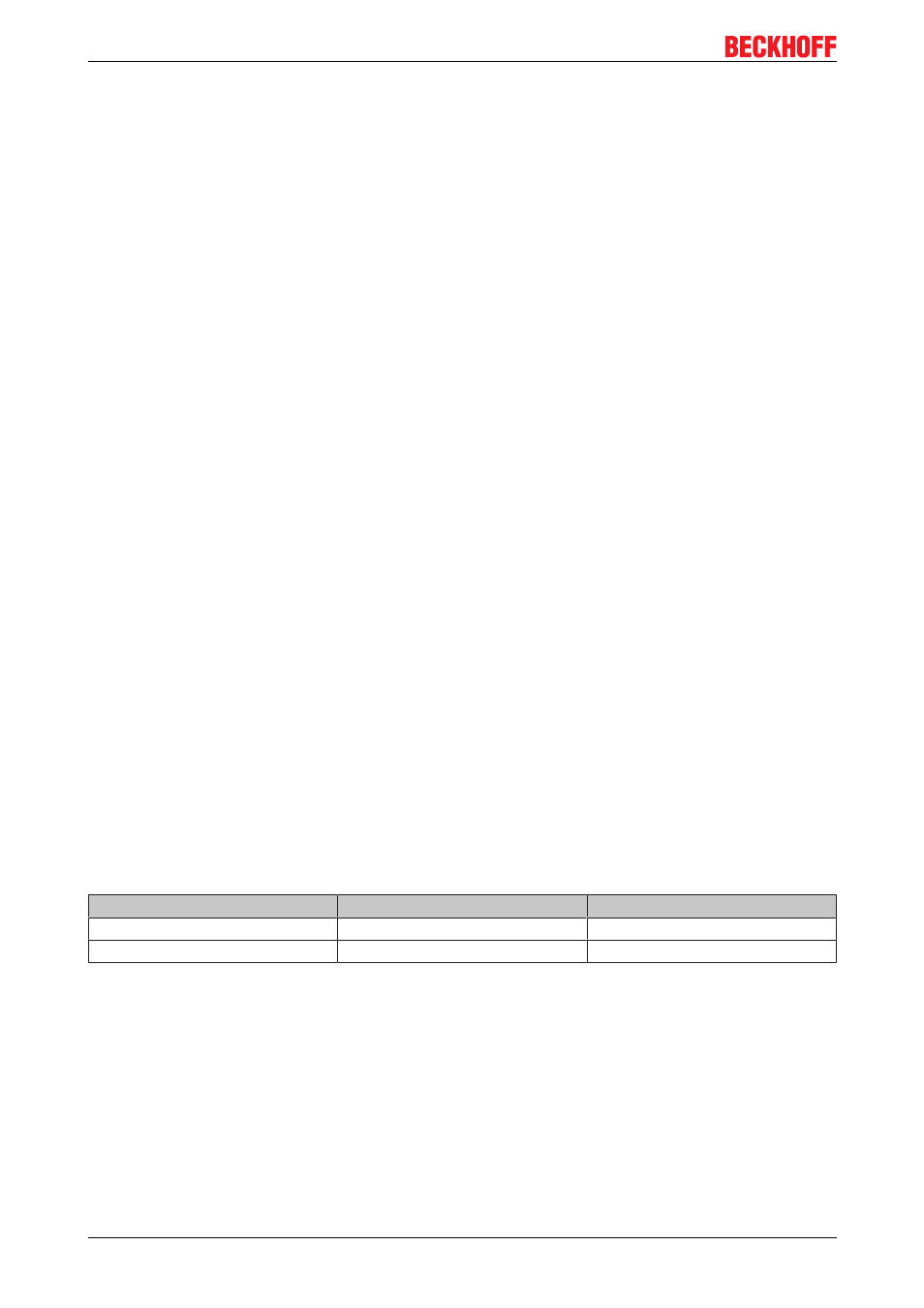
Schwinggüte
Die Motoren sind in Schwinggüte A nach DIN EN 6003414 ausgeführt. Das bedeutet für einen
Drehzahlbereich von 6003600 U/min und einer Achshöhe zwischen 54 – 97 mm eine zul. Schwingstärke
von 1,6 mm/s als Effektivwert.
Drehzahl [U/min]
Max. rel. Schwingweg [µm]
Max. Runout [µm]
<= 1800
90
23
> 1800
65
16
6.3.7
Vibrationen und Schocks
OCT und Multiturn:
Vibration nach EN 6006826 50 g / 10…2000 Hz
Schocks nach EN 60068227 100 g / 6 ms
6.3.8
Anschlusstechnik
Die Motoren sind mit abgewinkelten, drehbaren Steckern für die Leistungsversorgung und die
Feedbacksignale (nur Resolver) ausgerüstet.
Synchron Servomotor AM8100
16
Version 1.1