BECKHOFF CX1100-000x Benutzerhandbuch
Seite 50
Fehlerbehandlung und Diagnose
48
Embedded-PC
5. Fehlerbehandlung und Diagnose
Klemmenbusanalyse über ein SPS-Programm
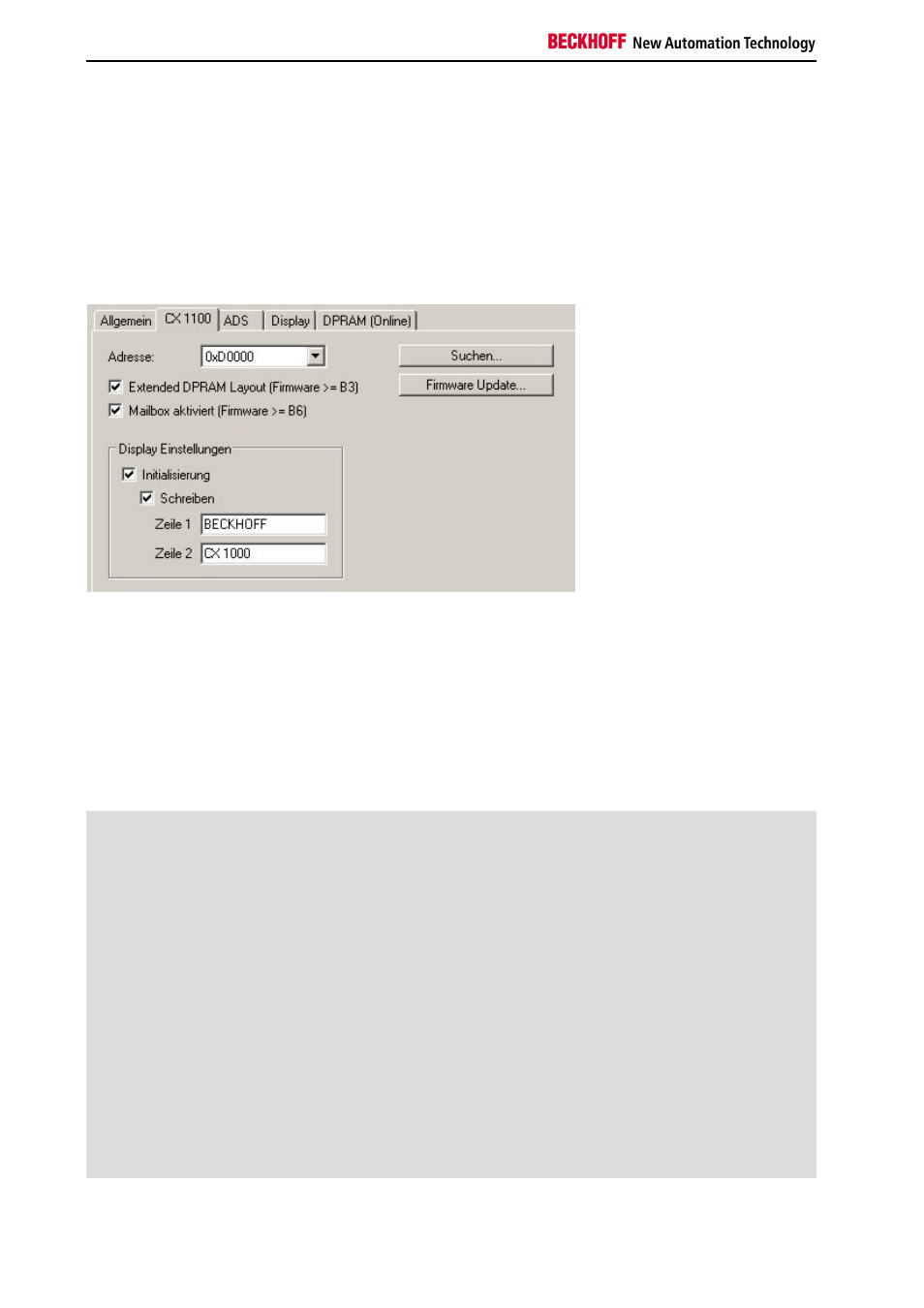
Zur Analyse des Klemmbus (K-Bus und IP-Link) kann auf die in der Architektur beschriebenen Register über
TwinCAT von einem SPS-Programm zugegriffen werden. Dazu muss die Klemmbusanbindung auf erweitertes
DPRAM Model geschaltet (Firmware > B3) sein. Mit diesen Einstellungen wird in TwinCAT das erweiterte
Registermodell aktiviert.
Die einzelnen Register, die in der Architekturbeschreibung erklärt sind sind als SPS-Datentypen verfügbar. Im
folgenden wird die Fehleranalyse als Beispiel vorgestellt. Die Vorgehensweise ist für beide Sub-Busse identisch,
daher wird in den Beschreibungen die Signale nur allgemein erklärt.
Für die Fehleranalyse werden im Wesentlichen vier Signale/Variablen benötigt:
BusState (gibt den Zustand des Busses an: 0 -> kein Fehler, 1 -> Busfehler)
ErrorCode (entspricht dem Errorcode beim Blinkcode der DiganoseLEDs)
ErrorArg (entspricht dem Argument-Code beim Blinkcode der DiganoseLEDs)
Request[0] (Ausgang zum Anfordern / Rücksetzen des Busses)
In dem SPS-Programm müssen dazu analog externe Variablen angelegt werden:
VAR
k_bus_request AT %QX0.0
: BOOL;
k_bus_err_code AT %IB0
: USINT;
k_bus_err_arg AT %IB1
: USINT;
k_bus_state AT %IB2
: USINT;
ip_bus_request AT %QX0.1 : BOOL;
ip_bus_err_code AT %IB3
: USINT;
ip_bus_err_arg AT %IB4
: USINT;
ip_bus_state AT %IB5
: USINT;
END_VAR
In dem SPS Programm kann dann der Fehler wie folgt bestimmt werden (es handelt sich hier um Pseudocode, der
so direkt nicht lauffähig ist)