Physikalischer hintergrund – BECKHOFF AL2000 Application Benutzerhandbuch
Seite 21
Eiserstraße 5 / D-33415 Verl / Telefon 05246/963-0 / Telefax 05246/963-149
21
Physikalischer Hintergrund
Normalerweise kann die Bewegung eines Linearmotors in drei Stufen unterteilt werden:
1. Beschleunigung
2. Konstante (oder maximale) Geschwindigkeit
3. Verzögerung
Im Folgenden wird dieses in einem Geschwindigkeit-Zeit-Diagramm dargestellt.
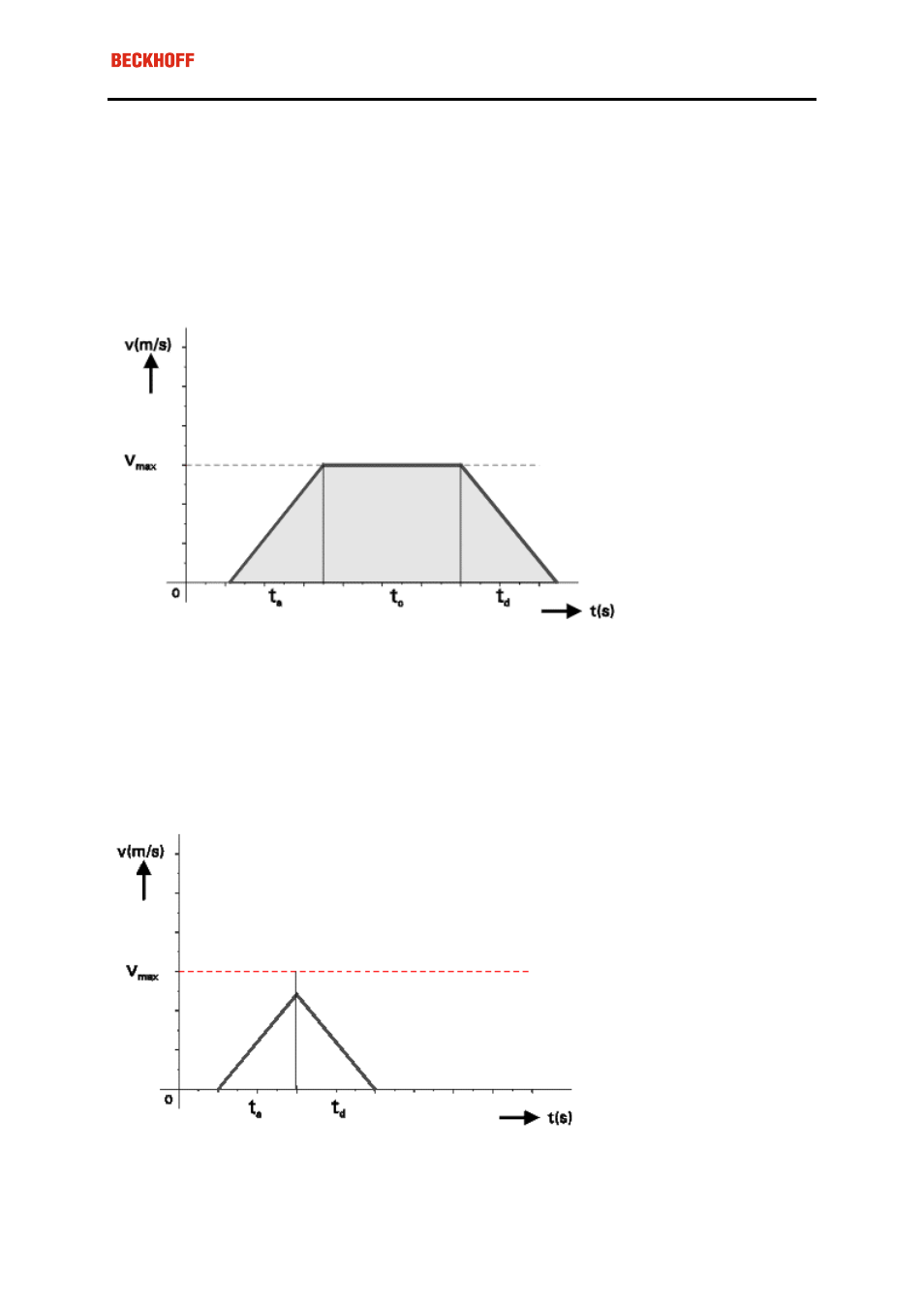
Geschwindigkeit-Zeit-Diagramm für eine kombinierte oder “lange Bewegung”
Während t
a
findet die Beschleunigung statt und während t
c
ist die Geschwindigkeit konstant bei ihrem Höchst-
wert. Die Verzögerung bis zum Stillstand findet während t
d
statt. Die gesamte im Verlauf der Bewegung zu-
rückgelegte Strecke entspricht der Fläche unter der grafischen Darstellung.
Während der Beschleunigung und Verzögerung treten die größten Kräfte auf, wogegen die Bewegung bei
konstanter Geschwindigkeit lediglich die Kraft zur Überwindung der Reibung erfordert. Aus diesem Grund ist
ein Linearmotor, der sich ständig hin und her bewegt, ohne seine Höchstgeschwindigkeit zu erreichen, am
meisten belastet. Im nachfolgenden Diagramm ist diese Situation aufgezeigt.
Geschwindigkeit-Zeit-Diagramm für eine kombinierte oder “kurze Bewegung”