1 gr undlag en – HEIDENHAIN TNC 407 (280 580) ISO Programming Benutzerhandbuch
Seite 37
29
HEIDENHAIN TNCs der Serie 400
Bezugssystem
Mit einem Bezugssystem legen Sie Positionen in einer Ebene oder
im Raum eindeutig fest. Die Angabe einer Position bezieht sich
immer auf einen festgelegten Punkt und wird durch Koordinaten
beschrieben.
Im rechtwinkligen System (kartesisches System) sind drei Richtun-
gen als Achsen X, Y und Z festgelegt. Die Achsen stehen jeweils
senkrecht zueinander und schneiden sich in einem Punkt, dem
Nullpunkt. Eine Koordinate gibt den Abstand zum Nullpunkt in einer
dieser Richtungen an. So läßt sich eine Position in der Ebene durch
zwei Koordinaten und im Raum durch drei Koordinaten beschreiben.
Koordinaten, die sich auf den Nullpunkt beziehen, werden als
absolute Koordinaten bezeichnet. Relative Koordinaten beziehen sich
auf eine beliebige andere Position (Bezugspunkt) im Koordinatensy-
stem. Relative Koordinaten-Werte werden auch als inkrementale
Koordinaten-Werte bezeichnet.
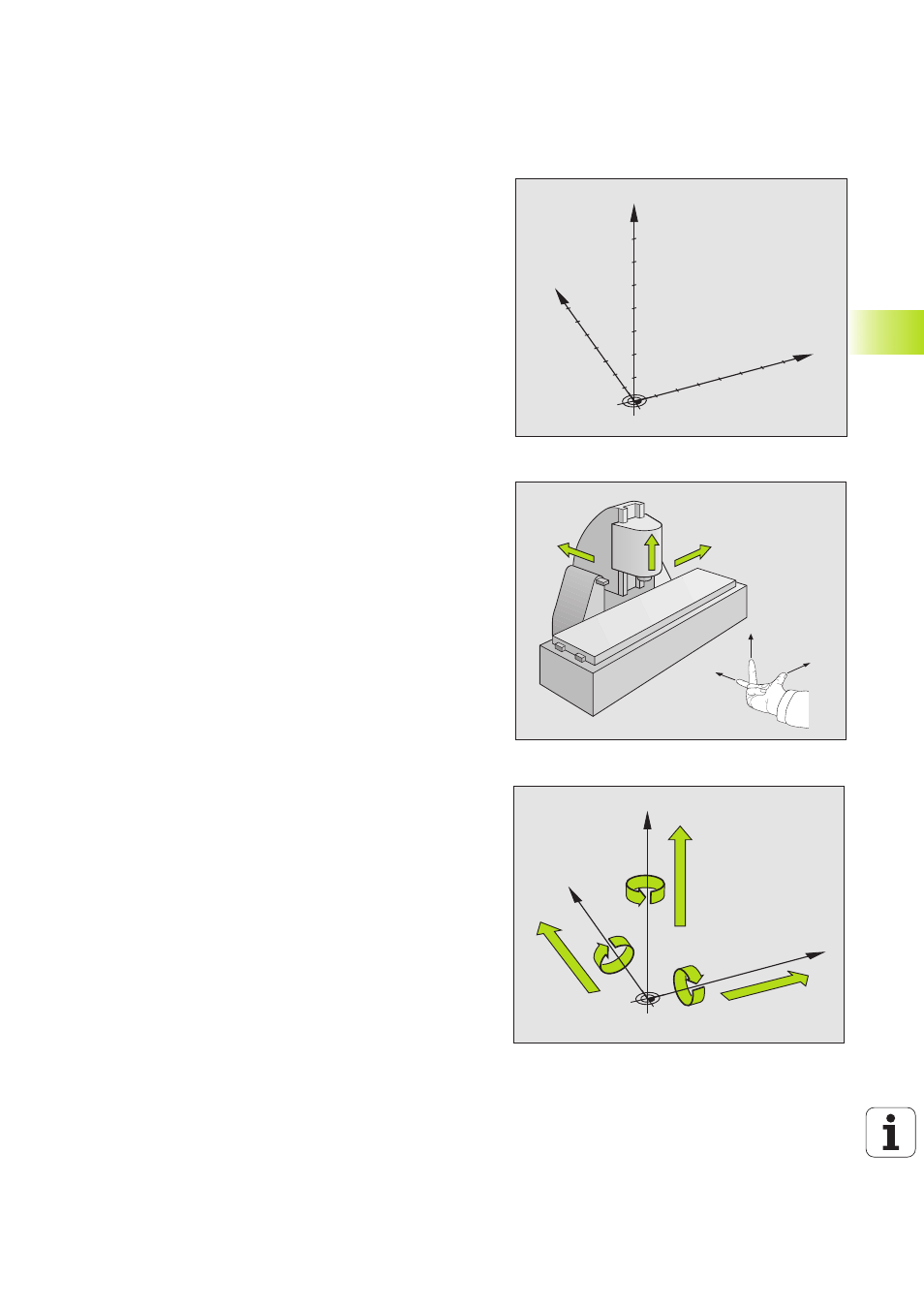
Bezugssysteme an Fräsmaschinen
Bei der Bearbeitung eines Werkstücks an einer Fräsmaschine
beziehen Sie sich generell auf das rechtwinklige Koordinatensystem.
Das Bild rechts zeigt, wie das rechtwinklige Koordinatensystem den
Maschinenachsen zugeordnet ist. Die Drei-Finger-Regel der rechten
Hand dient als Gedächtnisstütze: Wenn der Mittelfinger in Richtung
der Werkzeugachse vom Werkstück zum Werkzeug zeigt, so weist
er in die Richtung Z+, der Daumen in die Richtung X+ und der
Zeigefinger in Richtung Y+.
Die TNCs der Serie 400 können insgesamt maximal 5 Achsen
steuern. Neben den Hauptachsen X, Y und Z gibt es parallel laufen-
de Zusatzachsen U, V und W. Drehachsen werden mit A, B und C
bezeichnet. Das Bild unten zeigt die Zuordnung der Zusatzachsen
bzw. Drehachsen zu den Hauptachsen.
W+
C+
B+
V+
A+
U+
Y
X
Z
Y
X
Z
+X
+Y
+Z
+X
+Z
+Y