Messbereich – ifm electronic RM3001 Benutzerhandbuch
Seite 12
12
Messbereich
Der Messbereich wird vom Parameter "Gesamt-Messbereich in Messschritten" definiert. Der Drehgeber
hat zwei unterschiedliche Betriebsarten, abhängig vom spezifizierten Messbereich. Wenn der Drehgeber
eine Parameter-Übertragung registriert, prüft es die Skalierungsparameter auf binäre Skalierung. Wenn
die Prüfung eine binäre Skalierung feststellt, wählt der Drehgeber Betriebsart A (siehe folgende
Erklärung). Andernfalls wird die Betriebsart B gewählt.
0
Zyklischer Betrieb (binäre Skalierung)
Messbetriebsart A wird benutzt, wenn der Drehgeber mit Umdrehungsanzahl 2
x
arbeitet
(Umdrehungsanzahl 2, 4, 8, 16, 32, 64 128, 256, 512, 1024, 2048 und 4096).
Ist der gewünschte Messbereich gleich der spezifizierten Singleturn-Auflösung x 2
x
(wobei x
≤
12), so
arbeitet der Drehgeber in endlosem zyklischem Betrieb ( 0 – max. Positionswert – 0 – max.
Positionswert). Wenn durch die Bewegung der zu messenden Achse der Positionswert des Drehgebers
über den Maximalwert (Messbereich 1) hinausgeht, so gibt der Drehgeber wieder 0 als Positionswert an.
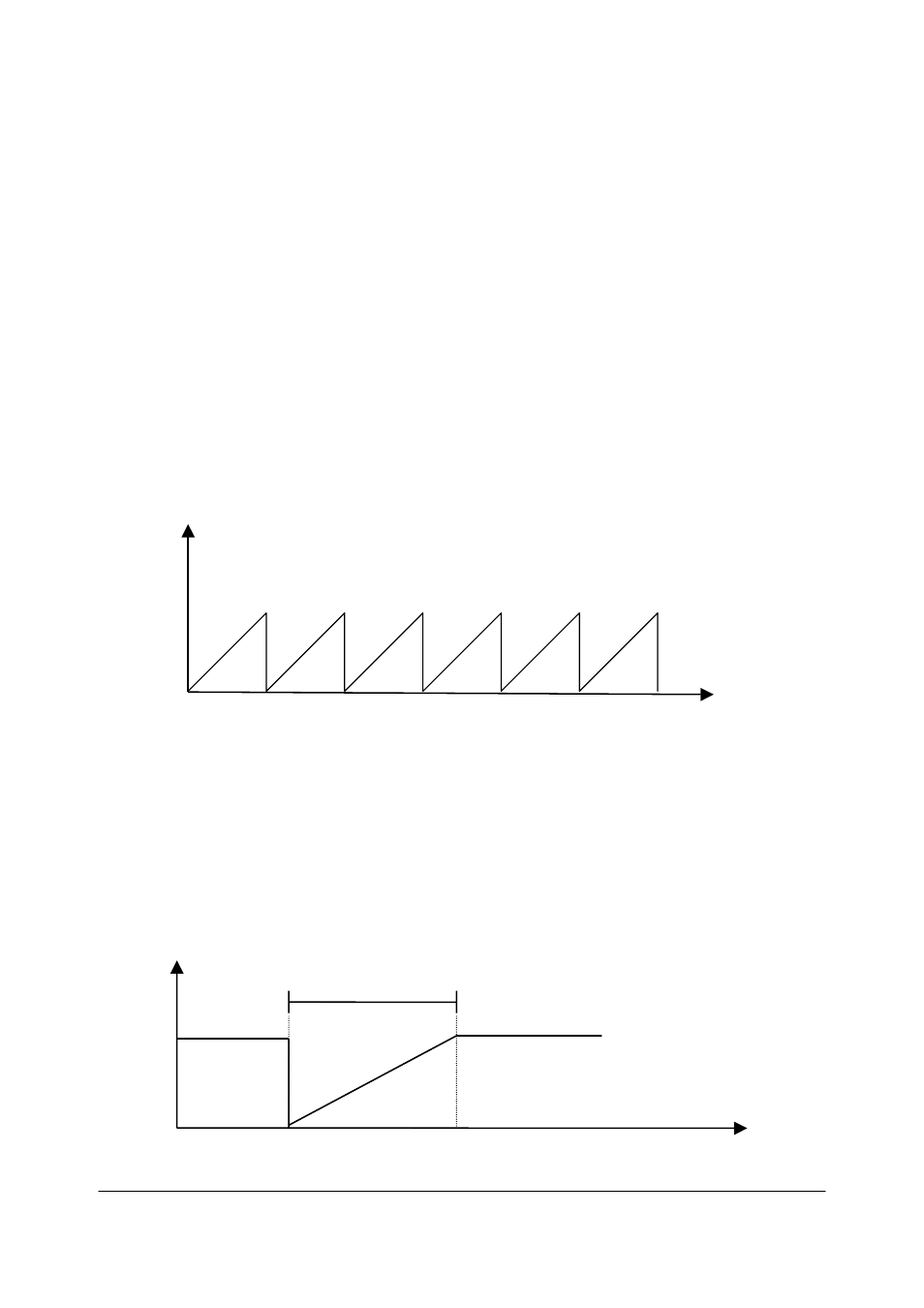
Beispiel einer zyklischen Skalierung:
Messschritte pro Umdrehung
= 1.000
Gesamtmessbereich
= 32.000 (2
5
= Anzahl Umdrehungen 32)
Position
32.000
0
Messbereich
B. Nichtzyklischer Betrieb
Wenn der Messbereich benutzt wird, um den Wertebereich des Drehgebers auf einen Wert ungleich der
spezifizierten Singleturn-Auflösung * 2
x
zu begrenzen, so wird der Ausgabepositionswert innerhalb des
Betriebsbereichs begrenzt. Wenn durch eine Drehung des Drehgebers der Positionswert über den
Maximalwert (Messbereich-1) hinaus oder unter 0 steigt bzw. fällt, so gibt der Drehgeber den
Messbereichwert aus. Siehe Abbildung unten.
Beispiel einer nichtzyklischen Skalierung:
Meßeinheiten pro Umdrehung
= 100
Gesamtmessbereich
= 5.000 (Anzahl Umdrehungen 50)
skalierter Gesamtbereich
5.000
Position
0
0 MAX
Messbereich