4 koppeln von linear-servomotoren, 1 temperatur-sensor, 2 anordnung der motoren – BECKHOFF AL2000 Linear servomotor Benutzerhandbuch
Seite 28: 4 koppeln von linearservomotoren, 1 temperatursensor
Mechanische Installation
7.4
Koppeln von LinearServomotoren
LinearServomotoren können miteinander verbunden werden, um zusammen auf einer Magnetbahn zu
agieren. Die Kräfte der Motoren addieren sich hierbei. Die Motoren werden hierbei parallel an den Regler
angeschlossen, was zu höheren Summenströmen führt. Motoren gleichen Typs können immer miteinander
verbunden werden. Motoren unterschiedlichen Typs, gleicher Baureihe können verbunden werden, wenn
ihre Kraftkonstante gleich ist.
7.4.1
TemperaturSensor
Verwenden Sie den TemperaturSensor des Motors, der die schlechteste Kühlung hat und somit die höhere
Temperaturentwicklung haben wird.
7.4.2
Anordnung der Motoren
Die Wicklungen der Motoren haben einen festen Abstand zu einander der baureihenabhängig ist. Bei den
Baureihen AL2xxx beträgt dieser 16 mm. Werden LinearServomotoren miteinander gekoppelt, muss ein
Vielfaches dieses Wicklungsabstandes auch zwischen den Wicklungen der verbundenen Motoren
vorhanden sein.
Phasenwiederholung = 3 x Wicklungsabstand = 3 x 16 mm = 48 mm
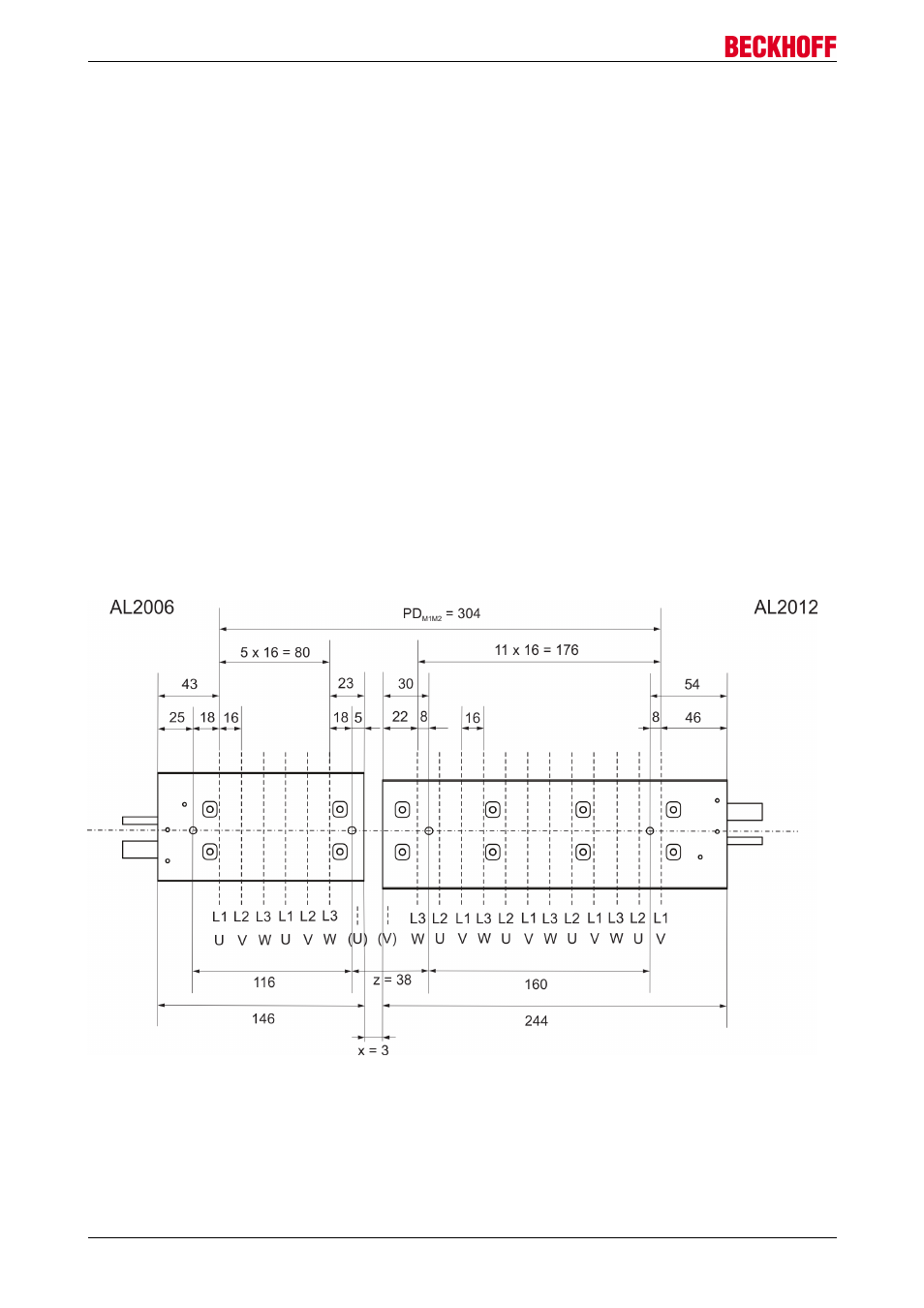
Beispiel 1 mit AL2006 und AL2012
In Beispiel 1 zeigen die Anschlussleitungen der Motoren in unterschiedliche Richtungen. Dies ermöglicht den
minimalen Abstand der LinearServomotoren zueinander.
PD
M1M2
= Phasenabstand „Phase L1 / Motor 1“ zu „Phase L1/ Motor 2“
x = Gehäuseabstand
z = Abstand der Befestigungsbohrungen
LinearServomotor AL2000
28
Version 4.0