3 berechnung des offsets – BECKHOFF AL2000 Linear servomotor Benutzerhandbuch
Seite 29
Mechanische Installation
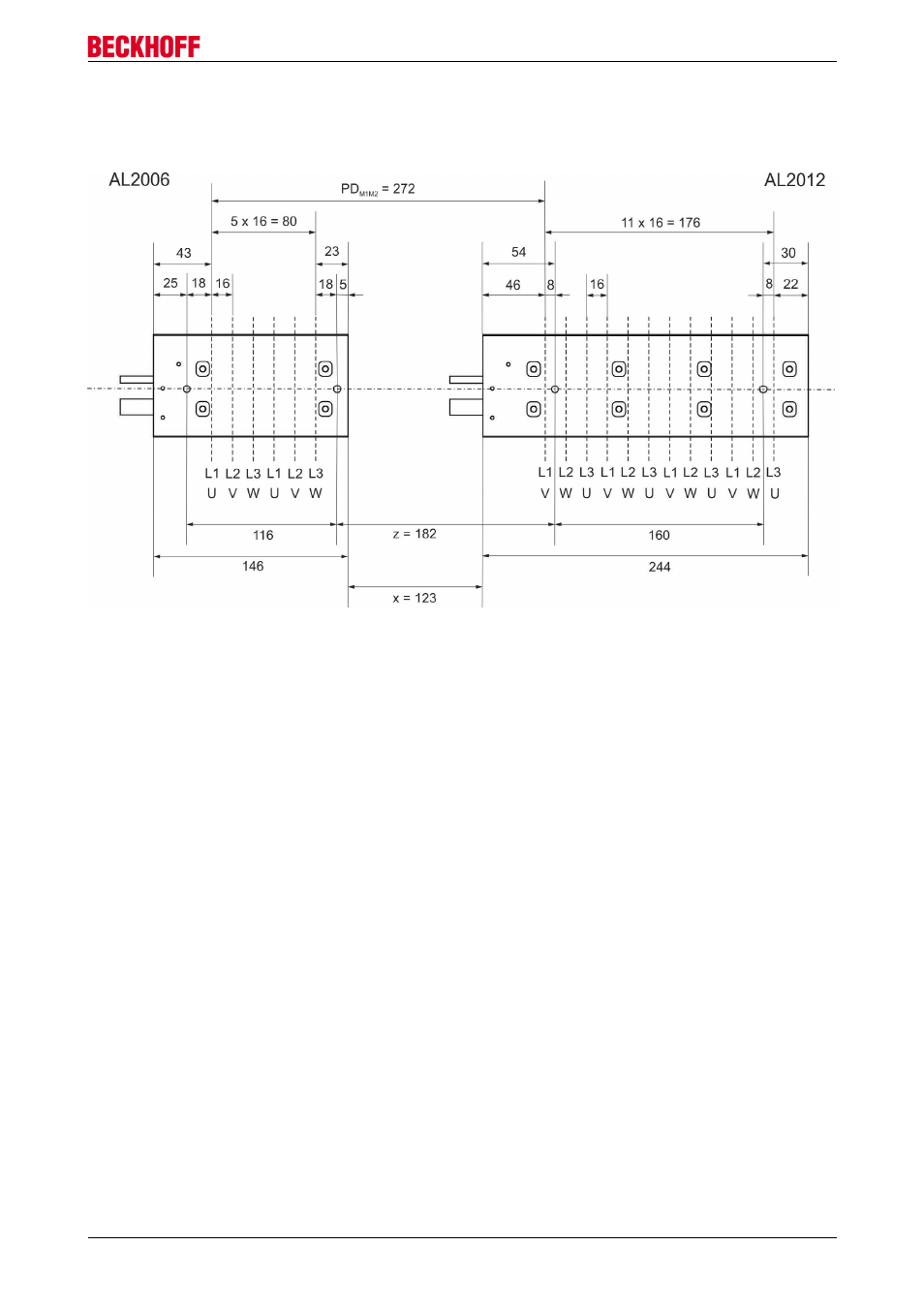
Beispiel 2 mit AL2006 und AL2012
In Beispiel 2 zeigen die Anschlussleitungen in dieselbe Richtung. Bei dieser Anordnung muss der minimale
Biegeradius der Motorleitung beachtet werden.
PD
M1M2
= Phasenabstand „Phase L1 / Motor 1“ zu „Phase L1/ Motor 2“
x = Gehäuseabstand
z = Abstand der Befestigungsbohrungen
7.4.3
Berechnung des Offsets
Die Verdrahtung muss je nach Anordnung der Spuleneinheiten durchgeführt werden. Dazu muss der Offset
bestimmt werden. Der Offset gibt an, um wieviel Spulen das Drehfeld im zweiten Motor verschoben ist. Mit
Hilfe des Offsets und der Tabelle in Kapitel Auslegung der Verdrahtung [
30] kann die Verdrahtung der
Motoren bestimmt werden.
Der Offset wird anhand folgender Formel berechnet:
Offset = (PD
M1M2
/ 16) MOD 3
Berechnung des Offsets für Beispiel 1:
Offset
= (304 / 16) MOD 3
= 19 MOD 3 = 1
Berechnung des Offsets für Beispiel 2:
Offset
= (272 / 16) MOD 3
= 17 MOD 3 = 2
LinearServomotor AL2000
29
Version 4.0