Roboter-heber-baugruppe -6 – Hypertherm THC Robotic System Benutzerhandbuch
Seite 20
Roboter-Heber-Baugruppe
Elektrische Anforderungen
Motor .................................................................................+ 5 VDC, zweiphasig (1 A per Phase)
Endschalter .......................................................................+ 24 VDC
Höhenverstellung-Steuerfunktionen
Motor .................................................................................Schritt
Motorantrieb ......................................................................Schritt, konstanter Abkippstrom
Höhenverstellung-Endschalter ..........................................Endlagenschalter und unterer Endschalter
Max. Z-Achsen-Geschwindigkeit.......................................2540 mm/min
Max. Z-Achsen-Hub ..........................................................25 mm
Höhe .................................................................................Abbildung 2-4
Gewicht (einschließlich Heber, Schnellanschluß,
Brenner und Verschleißteile) .........................................2,85 kg
SPEZIFIKATIONEN
6
2-6
Command THC
(
Roboter)
Betriebsanleitung
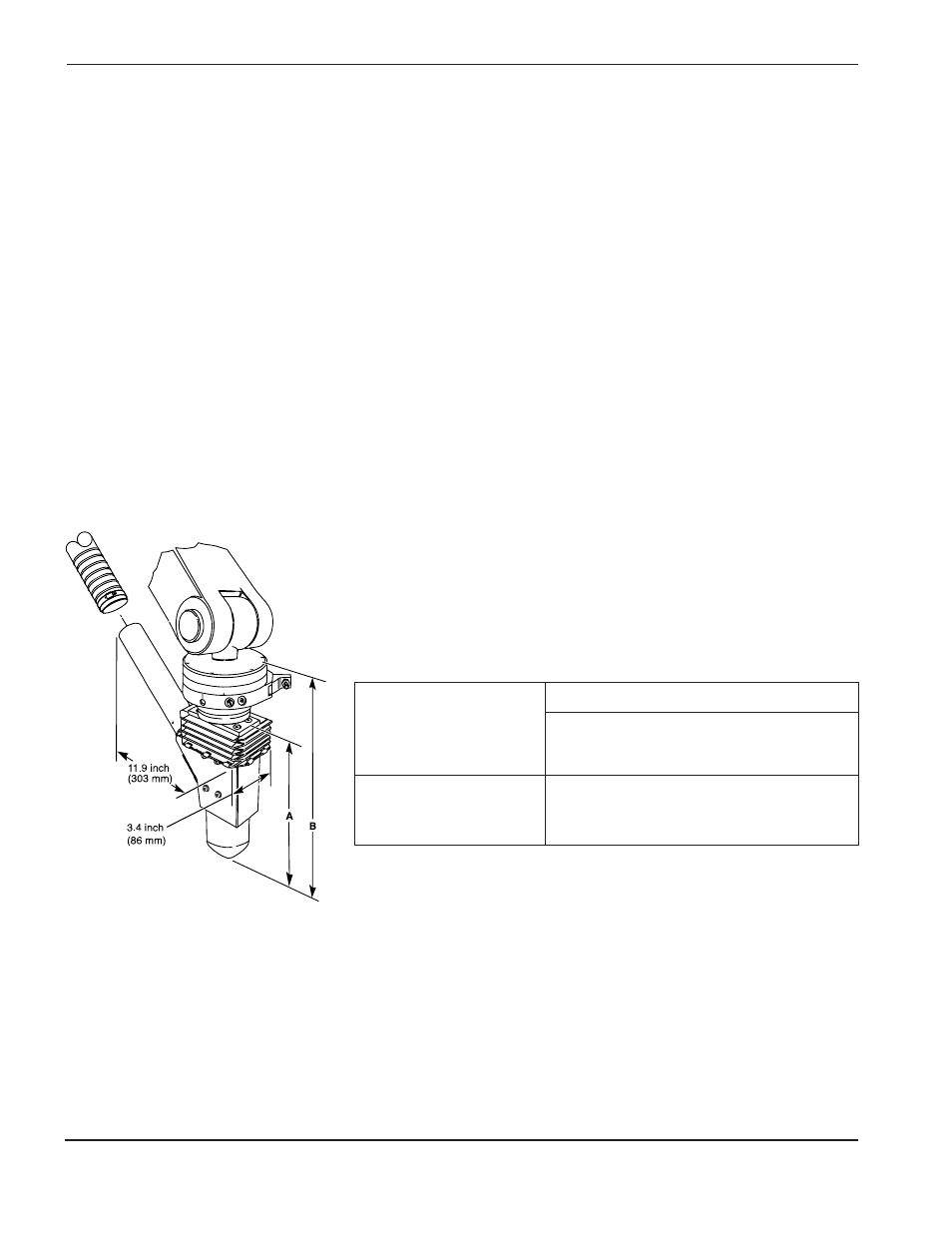
Abbildung 2-4
Roboter-Heber-Baugruppe
Position
Teilweise
Vollständig
hochgezogen
Vollständig
hochgezogen
(Benutzer)
ausgefahren
A. Ohne Freigabe-Option
264 mm
276 mm
289 mm
B. Mit Freigabe-Option
321 mm
334 mm
346 mm
THC.19