KLING & FREITAG K&F CD 44 Digital System controller Benutzerhandbuch
Seite 19
Benutzerhandbuch
K&F CD 44 Digitaler Systemcontroller
KLING & FREITAG GMBH © 2014
Version 11.6
Seite 19 von 80
4.
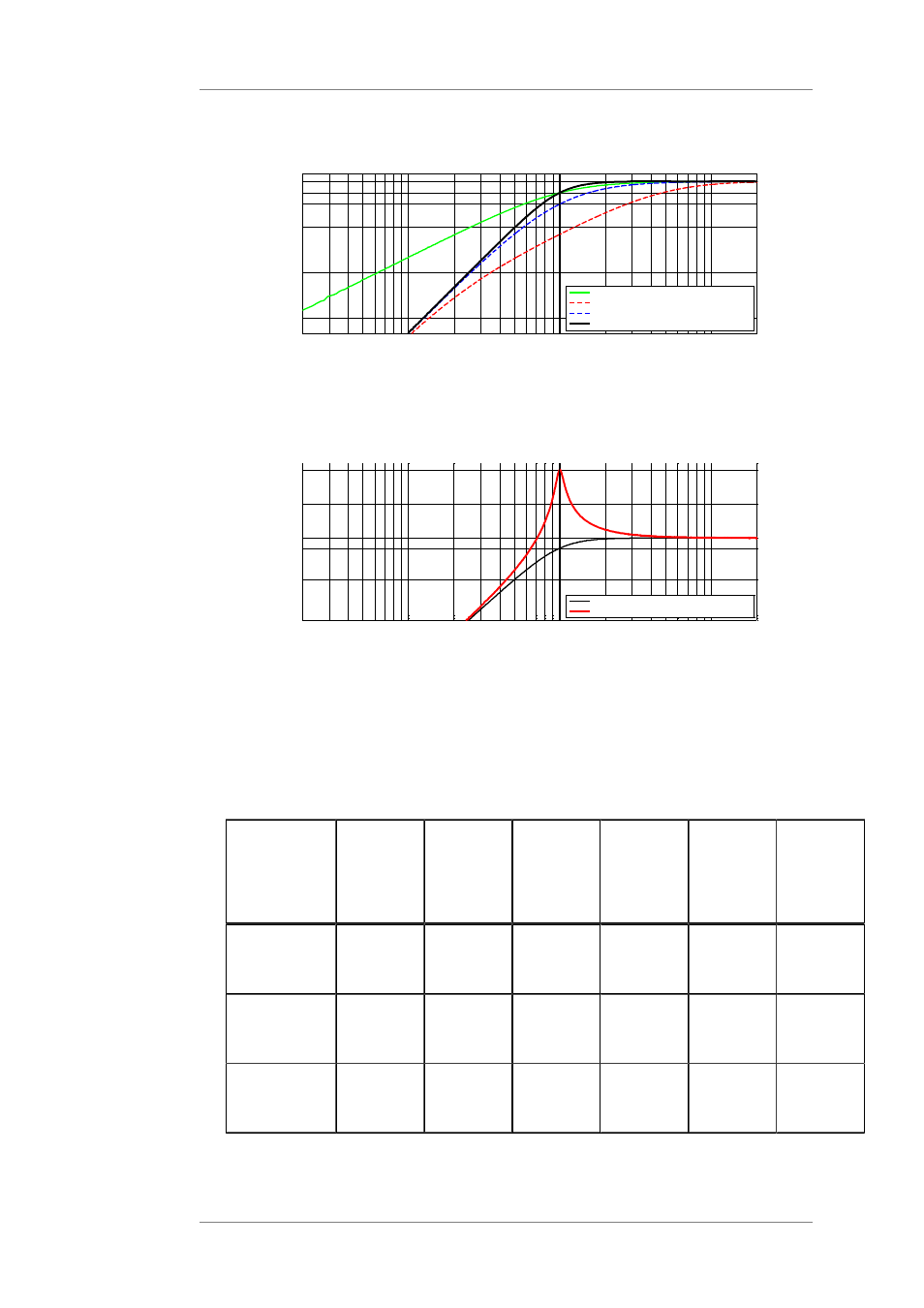
Dieses Beispiel zeigt verschiedene Hochpassfilter, die durch unterschiedliche Q-Faktoren
und ihre Ordnungszahl charakterisiert werden.
20
50
100
500
1000
5000
10000
20000
-40
-36
-24
-12
-6
-3
0
2
Frequency in [Hz]
P
o
w
e
r
in
[
d
B
]
FilterType = 'HighP' (Highpass) Freq = 1000Hz
Q = 0.707
Butterworth 1.Ordnung
Q = 0.2
Q = 0.5
Linkwitz-Riley 2.Ordnung
Q = 0.707 (default) Butterworth 2.Ordnung
Das erzeugte Filter mit Q = 0,707 ist ein Butterworth-Filter 2. Ordnung und bewirkt
eine Absenkung von 3dB an der Grenzfrequenz (-3dB @ 1000Hz). Unterhalb der
Grenzfrequenz wird um 12dB pro Oktave abgesenkt (-12dB / Oktave).
20
50
100
500
1000
5000
10000
20000
-24
-12
-3
0
10
20
Frequency in [Hz]
A
m
p
li
tu
d
e
i
n
[d
B
]
FilterType = 'HighP' (Highpass)
Freq = 1000Hz
Q = 0.707 (default)
Butterworth -12dB/Oct
Q = 10
Ein Q größer als 1 bewirkt eine Pegelanhebung der Übernahmefrequenz.
Sie haben die Wahl zwischen einem Hochpassfilter 1. Ordnung und 2. Ordnung. Bei
einem Hochpassfilter 1. Ordnung ist die Güte Q festgelegt. Bei einem Hochpassfilter 2.
Ordnung ist Q in 0,001 Schritten von 0,2 bis 20 einstellbar.
Der Parameter 'Gain' hat bei Hochpassfiltern keine Auswirkung.
In der unten stehenden Tabelle ist aufgeführt, wie Sie gängige Hoch- und Tiefpassfilter
realisieren können und wie viele parametrische Filter Sie dafür benötigen.
Filtertyp
Steilheit
Anzahl
benötig-
ter
PEQs
Q
Hoch- /
Tiefpassfilter
1
Q
Hoch- /
Tiefpassfilter
2
Q
Hoch- /
Tiefpassfilter
3
Q
Hoch- /
Tiefpass-
filter
3
Butterworth
1.Ord.
6
db/
Okt
1
0
-
-
-
Butterworth
2.Ord.
12
db/
Okt
1
0,707
-
-
-
Linkwitz-
Riley
2.Ord.
12
db/
Okt
1
0,5
-
-
-