Das telegramm 81 des profidrive profils – Baumer GE-GB-GXxxx Benutzerhandbuch
Seite 18
Handbuch_ProfibusDPV2_BIDE_DE.docx
18/41
Baumer IVO GmbH & Co. KG
22.11.12
Villingen-Schwenningen, Germany
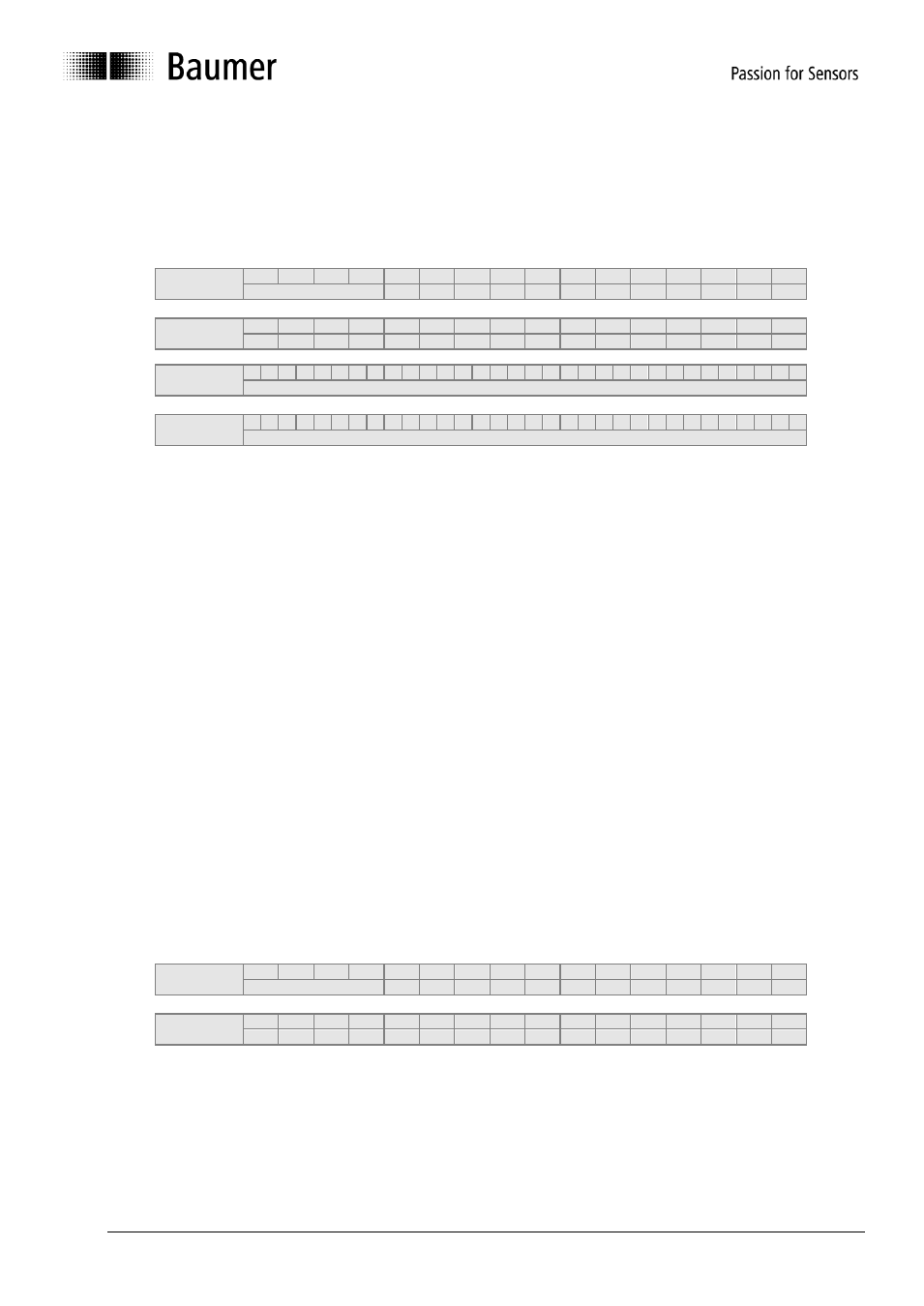
6.3. Das Telegramm 81 des PROFIdrive Profils
Gemäss PROFIBUS DP-V2-Encoder-Profil verwendet der Drehgeber für die zyklische Kommunikation im
taktsynchronen Betrieb das Telegramm81 des PROFIdrive Profils. Es werden dabei zyklisch und
taktsynchron 12 Byte Eingangsdaten und 4 Byte Ausgangsdaten übertragen.
Eingangsdaten
Die Eingangsdaten überträgt der Drehgeber zyklisch an die Steuerung.
ZSW2
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
Slave Sign-of-Life
0
0
0
0
0
0
0
0
0
0
0
0
G1_ZSW1
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
SE
PS
TA
PA
EA
0
0
0
0
0
0
0
0
0
0
0
G1_XIST1
31
0
Geberposition (linksbündig) mit / ohne Preset-Offset
G1_XIST2
31
0
Geberposition (rechtsbündig) oder Fehlermeldung
Bit SE: Sensor Error
Wenn Bit gesetzt, enthält G1_XIST2 an Stelle der Position einen Fehlercode
Bit PS: Parking Sensor Active (Acknowledgement)
Wenn Bit gesetzt, ist die Funktion „Parking Sensor“ aktiv (Fehlerausgabe unterdrückt)
Bit TA:
Transmit absolute value cyclically (Acknowledgement)
Wenn Bit gesetzt, wird in G1_XIST2 die Position zyklisch übertragen.
Beim vorliegenden Drehgeber ist das immer der Fall.
Bit PA: Preset Acknowledgement
Wenn Bit gesetzt, ist der Vorgang des Preset Setzens im Drehgeber erfolgreich
abgeschlossen. Dieses Bit spiegelt das Preset-Bit der Ausgangsdaten und wird
nach dessen Zurücksetzen automatisch zurückgenommen.
Bit EA: Error Acknowledge Required
Wenn Bit gesetzt, muss ein Fehler im Drehgeber quittiert werden.
Beim vorliegenden Drehgeber ist das nicht der Fall (Bit immer 0)
Die Positionsdaten werden in den zwei Eingangs-Doppelworten G1_XIST1 und G1_XIST2
übertragen. G1_XIST1 enthält den Positionswert linksbündig, d.h. beim grössten Positionswert (je
nach Skalierung) ist das Bit 31 = 1. G1_XIST2 enthält den Positionswert rechtsbündig in der
gewohnten Normaldarstellung. Im Fehlerfall enthält G1_XIST2 einen Fehlercode. Eine Skalierung
wirkt sich immer auf beide Doppelworte aus.
Der Einfluss des Presets auf den Positionswert G1_XIST1 kann über die Parametrierung
abgeschaltet werd
en („G1_XIST1 affected by Preset“). In diesem Fall zeigen G1_XIST1 und
G1_XIST2 unterschiedliche Positionswerte. G1_XIST2 wird immer durch den Preset beeinflusst.
Ausgangsdaten
Die Steuerung überträgt Ausgangsdaten zyklisch an den Drehgeber.
STW2
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
Master Sign-of-Life
0
0
0
0
0
0
0
0
0
0
0
0
G1_STW1
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
SEA PS
TA
PR REL
0
0
0
0
0
0
0
0
0
0
0
Bit SEA: Sensor Error Acknowledgement
Wenn Bit gesetzt, wird der in G1_XIST2 gemeldete Fehlercode quittiert.
Dies ist beim vorliegenden Drehgeber nicht erforderlich.
Bit PS: Parking Sensor Active (Acknowledgement)
Wenn Bit gesetzt, ist die Funktion „Parking Sensor“ aktiv (Fehlerausgabe unterdrückt)
Bit TA:
Transmit absolute value cyclically (Acknowledgement)
Wenn Bit gesetzt, wird in G1_XIST2 die Position zyklisch übertragen. Beim vorliegenden
Drehgeber ist das immer der Fall, unabhängig davon, wie dieses Bit gesetzt ist