8 beseitigung von störungen, Beseitigung von störungen, Beckhoff – BECKHOFF AX2000 Benutzerhandbuch
Seite 90
9.8
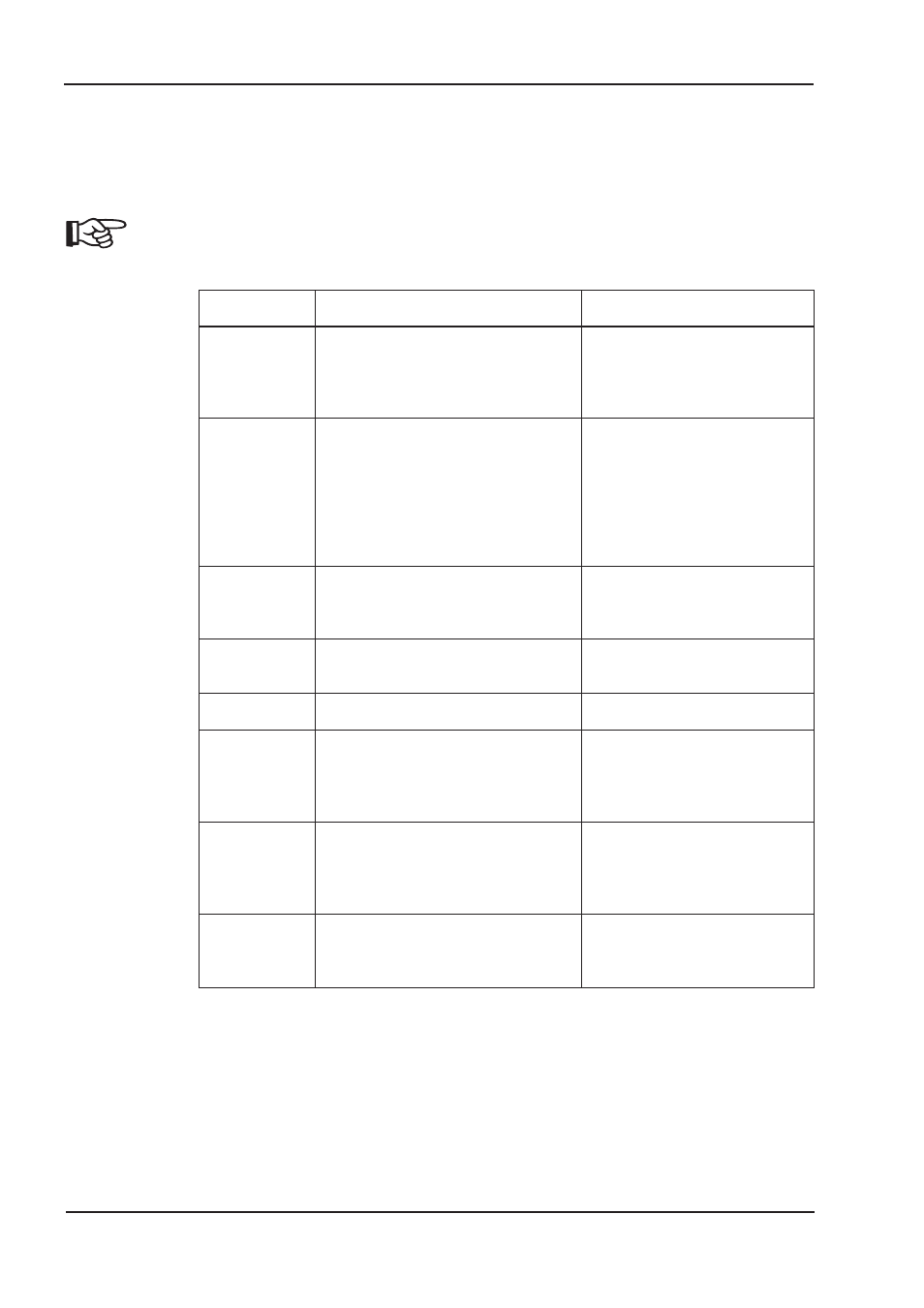
Beseitigung von Störungen
Abhängig von den Bedingungen in Ihrer Anlage können vielfältige Ursachen für die auftretende Stö-
rung verantwortlich sein. Bei Mehrachssystemen können weitere versteckte Fehlerursachen vorlie-
gen.
Detaillierte Beschreibung von Fehlerursachen und Tipps zur Behebung finden Sie
im Abschnitt "Trouble-Shooting" in der Online-Hilfe der Inbetriebnahme-Software.
Unsere Applikationsabteilung hilft Ihnen bei Problemen weiter.
Fehler
mögliche Fehlerursachen
Maßnahmen zur Beseitigung der
Fehlerursachen
Fehlermeldung
Kommunika-
tions-
störung
— falsche Leitung verwendet
— Leitung auf falschen Steckplatz am
Servoverstärker oder PC gesteckt
— falsche PC-Schnittstelle gewählt
— Nullmodem-Leitung verwenden
— Leitung auf richtige Steckplätze
am Servoverstärker und am PC
stecken
— Schnittstelle korrekt anwählen
Motor dreht
nicht
— Servoverstärker nicht freigegeben
— Sollwertleitung unterbrochen
— Motorphasen vertauscht
— Bremse ist nicht gelöst
— Antrieb ist mechanisch blockiert
— Motorpolzahl nicht korrekt eingestellt
— Rückführung falsch eingestellt
— ENABLE-Signal anlegen
— Sollwertleitung prüfen
— Motorphasen korrekt auflegen
— Bremsenansteuerung prüfen
— Mechanik prüfen
— Parameter Motorpolzahl
korrigieren
— Rückführung korrekt einstellen
Motor schwingt
— Verstärkung zu hoch (Drehzahlregler)
— Abschirmung Rückführleitung
unterbrochen
— AGND nicht verdrahtet
— Kp (Drehzahlregler) verkleinern
— Rückführleitung erneuern
— AGND mit CNC-GND verbinden
Antrieb meldet
Schleppfehler
— I
rms
bzw. I
peak
zu klein eingestellt
— Sollwertrampe zu groß
— I
rms
bzw. I
peak
vergrößern
(Motordaten beachten !)
— SW-Rampe +/- verkleinern
Motor wird zu
heiß
— I
rms
/I
peak
zu groß eingestellt
— I
rms
/I
peak
verkleinern
Antrieb zu
weich
— Kp (Drehzahlregler) zu klein
— Tn (Drehzahlregler) zu groß
— PID-T2 zu groß
— T-Tacho zu groß
— Kp (Drehzahlregler) vergrößern
— Tn (Drehzahlregler), Motor-
defaultwert
— PID-T2 verkleinern
— T-Tacho verkleinern
Antrieb läuft
rauh
— Kp (Drehzahlregler) zu groß
— Tn (Drehzahlregler) zu klein
— PID-T2 zu klein
— T-Tacho zu klein
— Kp (Drehzahlregler) verkleinern
— Tn (Drehzahlregler), Motor-
defaultwert
— PID-T2 vergrößern
— T-Tacho vergrößern
Achse driftet bei
Sollwert=0V
— Offset bei analoger Sollwertvorgabe
nicht korrekt abgeglichen
— AGND nicht mit CNC-GND der
Steuerung verbunden
— SW-Offset (Analog I/O)
abgleichen
— AGND und CNC-GND verbinden
90
AX 2001...2020 Produkthandbuch
Inbetriebnahme
07/2007
BECKHOFF