I - 1 grundlagen für positionsangaben – HEIDENHAIN PT 855 for Turning Benutzerhandbuch
Seite 6
I - 1 Grundlagen für Positionsangaben
POSITIP 855
Benutzer-Anleitung
7
I - 1
Grundlagen für Positionsangaben
Wenn Sie mit den Begriffen Koordinatensystem, Inkremen-
talmaß, Absolutmaß, Soll-Position, Ist-Position und Rest-
weg vertraut sind, können Sie dieses Kapitel überspringen.
Einführung
Zur Beschreibung der Geometrie eines Werkstücks bedient man
sich eines rechtwinkligen Koordinatensystems (= kartesisches
Koordinatensystem, nach dem französischen Mathematiker und
Philosophen René Descartes, lateinisch Renatus Cartesius;
1596 bis 1650).
Das kartesische Koordinatensystem besteht aus den drei
Koordinatenachsen X, Y und Z, die aufeinander senkrecht stehen
und sich in einem Punkt schneiden. Dieser Punkt heißt Nullpunkt
des Koordinatensystems.
Um Positionen auf dem Werkstück zu bestimmen, legt man das
Koordinatensystem gedanklich auf das Werkstück.
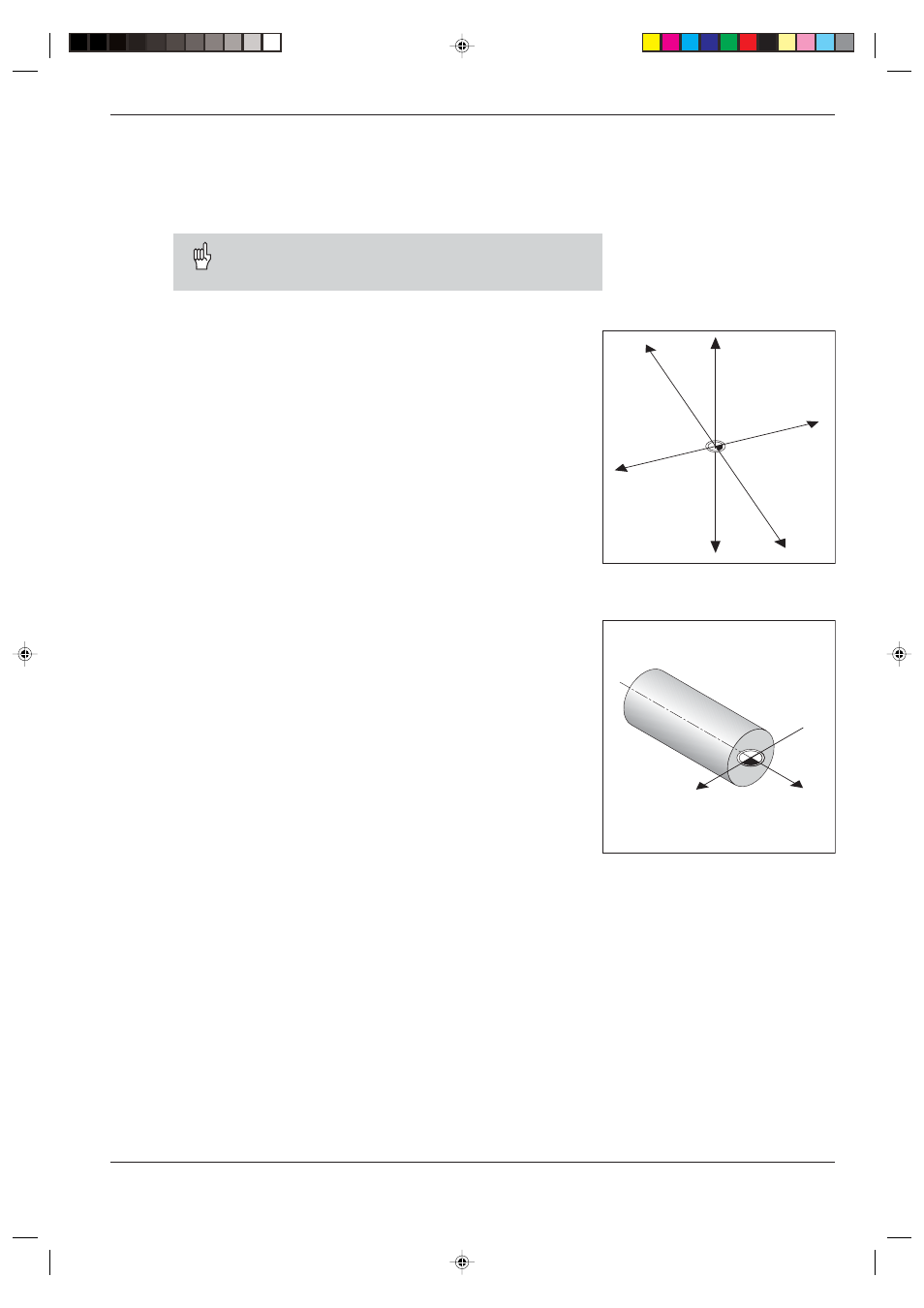
Bei Drehteilen (rotationssymmetrischen Werkstücken) fällt die
Z-Achse mit der Drehachse zusammen. Die X-Achse verläuft in
Richtung des Radius bzw. des Durchmessers. Auf die Angabe der
Y-Achse kann bei Drehteilen verzichtet werden, da sie stets die
gleichen Werte wie die X-Achse beschreiben würde.
+Y
+X
+Z
–Z
–Y
–X
Z
X
Bild 1: Das kartesische Koordinatensystem
Bild 2: Das kartesische Koordinatensystem-
beim Drehteil
855di1.PM6
26.03.2002, 11:43
7