3 pnu 1785: fahrauftragsart, 4 pnu 1783: beschleunigungszeit, 5 pnu 1784: ruckbegrenzung beschleunigung – BECKHOFF AX2500 PROFIBUS DP communication profile Benutzerhandbuch
Seite 27: Beschleunigungszeit, Beschleunigung, Pnu 1785: fahrauftragsart, Pnu 1783: beschleunigungszeit, Pnu 1784: ruckbegrenzung beschleunigung, Parameterkanal (pkw)
4.2.5.3
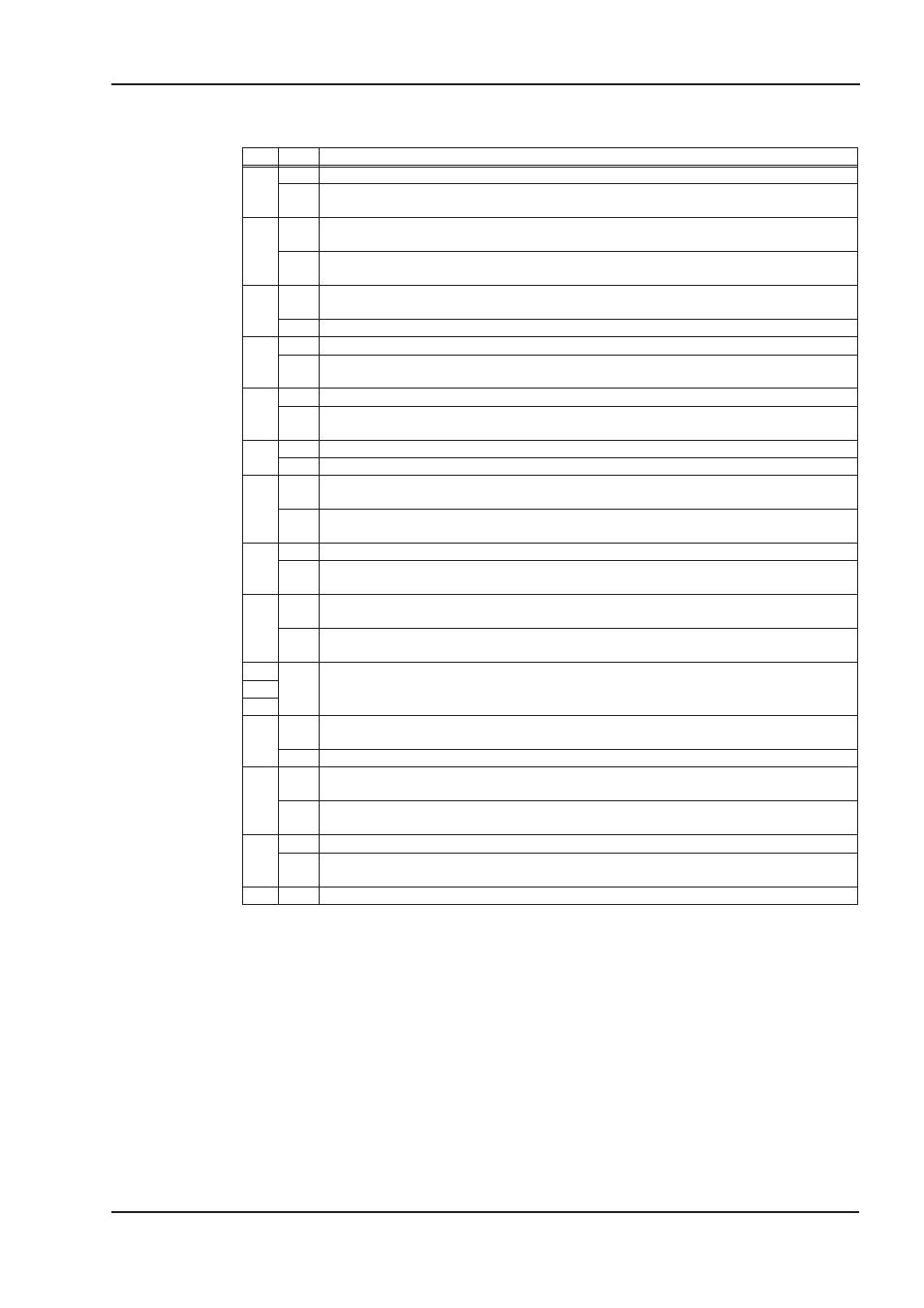
PNU 1785: Fahrauftragsart
Bit
Wert Bedeutung
0
0
Der angegebene Positionswert wird als absolute Position ausgewertet.
1
Der angegebene Positionswert wird als relative Verfahrstrecke ausgewertet, die beiden folgen-
den Bits entscheiden dann über die Art der Relativfahrt.
1
0
Wenn Bit 1 und Bit 2 auf 0 sind und Bit 0 auf 1 steht, wird der Relativfahrauftrag in Abhängigkeit
vom “InPosition” – Bit ausgeführt.
1
Die neue Zielposition ergibt sich aus der alten Zielposition plus der Verfahrstrecke.
Bit 1 hat Vorrang vor Bit 2.
2
0
Wenn Bit 1 und Bit 2 auf 0 sind und Bit 0 auf 1 steht, wird der Relativfahrauftrag in Abhängigkeit
vom “InPosition” – Bit ausgeführt.
1
Die neue Zielposition ergibt sich aus der aktuellen Istposition plus der Verfahrstrecke.
3
0
kein Folgefahrauftrag vorhanden
1
Es gibt einen Folgefahrauftrag, der über den Parameter O_FN, PNU 1788 definiert werden
muss.
4
0
Umschalten auf den Folgefahrauftrag mit Abbremsen auf Geschwindigkeit 0 in der Zielposition.
1
Umschalten auf den Folgefahrauftrag ohne Stillstand auf der Zielposition.
Die Art des Geschwindigkeitsübergangs wird durch Bit 8 eingestellt.
5
0
Umschalten auf Folgefahrauftrag ohne Auswertung von Eingängen.
1
Ein Folgefahrauftrag wird über einen entsprechend konfigurierten Eingang gestartet
6
0
Start des Folgefahrauftrags über Input – Zustand Low oder falls Bit 7 = 1 auf jeden Fall nach der
über PNU 1789 eingestellten Verzögerungszeit.
1
Start des Folgefahrauftrags über Input – Zustand High oder falls Bit 7 = 1 auf jeden Fall nach der
über PNU 1789 eingestellten Verzögerungszeit.
7
0
Der Folgefahrauftrag wird sofort gestartet.
1
Der Folgefahrauftrag wird nach der über PNU 1789 eingestellten Wartezeit
oder falls Bit 6 = 1 ist, schon vorher durch ein entsprechendes Input – Signal gestartet.
8
0
Nur bei Folgefahraufträgen und Bit 4 = 1: Die Geschwindigkeit wird ab der Zielposition des Vor-
gängerfahrauftrags auf den Wert des Folgefahrauftrags geändert.
1
Die Geschwindigkeitsumschaltung erfolgt so, dass die Geschwindigkeit in der Zielposition des
Vorgängerfahrauftrags den im Folgefahrauftrag festgelegten Wert erreicht.
9
-
reserviert
10
11
12
0
Beschleunigungen werden anhand der Anfahr- und Bremszeiten des Fahrauftrages
berechnet.
1
Die Beschleunigungs- und Bremsrampen werden in der Einheit mm/s² interpretiert.
13
0
Die Zielposition und Zielgeschwindigkeit eines Fahrauftrages werden als Inkremente
interpretiert.
1
Die Zielposition und Zielgeschwindigkeit werden vor dem Start des Fahrauftrages in Inkremente
umgerechnet. Dafür werden die Parameter PGEARI und PGEARO benutzt
14
0
Als Fahrauftragsgeschwindigkeit wird die programmierte Geschwindigkeit verwendet.
1
Die Fahrauftragsgeschwindigkeit wird durch die bei Fahrauftragsstart am Analogeingang 1 anlie-
gende Spannung bestimmt.
15
-
reserviert
4.2.5.4
PNU 1783: Beschleunigungszeit
Über diesen Parameter wird die Gesamtzeit angegeben, um auf die Zielgeschwindigkeit des Fahr-
auftrags zu kommen.
4.2.5.5
PNU 1784: Ruckbegrenzung Beschleunigung
Über diesen Parameter wird die Form der Beschleunigungsrampe vorgegeben. Wird hier ein Wert
¹
0 eingetragen, so wird eine sin²-Rampe verwendet, um die Zielgeschwindigkeit zu erreichen. Um
Sinus²-Rampen nutzen zu können, muss die Konfigurationsvariable SPSET auf 2 gesetzt (über den
ASCII-Kanal oder das ASCII-Terminal der Inbetriebnahmesoftware) und abgespeichert werden.
PROFIBUS für AX2000/2500
27
BECKHOFF
12/05
Parameterkanal (PKW)