1 positionierung (opmode 2), Positionierung (opmode 2), Beckhoff – BECKHOFF AX2500 PROFIBUS DP communication profile Benutzerhandbuch
Seite 38
5.2.1
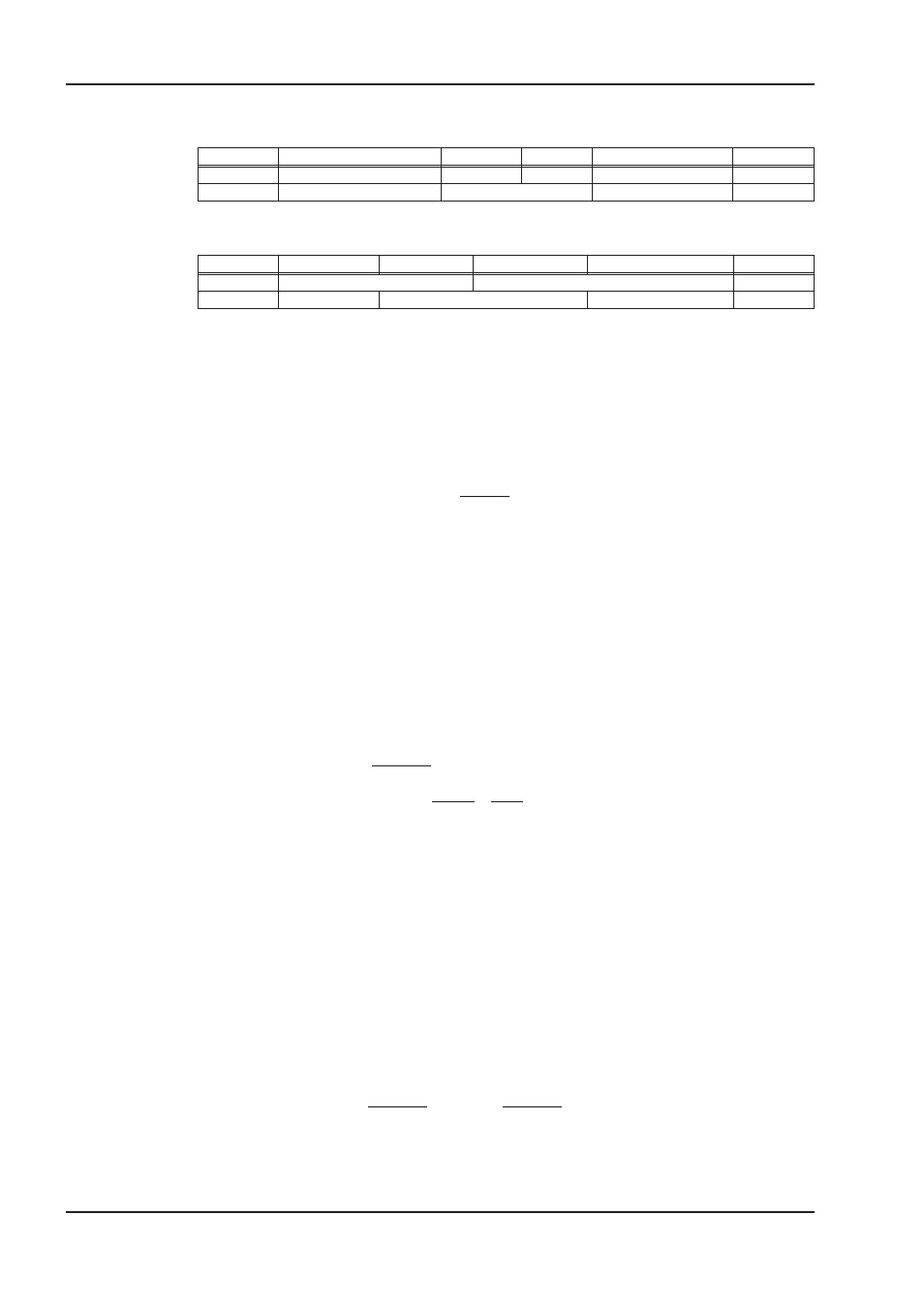
Positionierung (Opmode 2)
PZD 1
PZD 2
PZD 3
PZD 4
PZD 5
PZD 6
STW
Fahrsatznummer oder v
soll
*
-
-
-
-
ZSW
n
ist
(16 Bit)
Istposition (32 Bit)
Herstellerspez. Status
-
*: für Tippen / Referenzieren
Abweichende Belegung der Prozessdatenfächer bei STW Bit 14=1:
PZD 1
PZD 2
PZD 3
PZD 4
PZD 5
PZD 6
STW
Direktfahrauftrag: V
soll
(32 Bit)
Sollposition (32 Bit)
Fahrsatzart
ZSW
n
ist
(16 Bit)
Istposition (32 Bit)
Herstellerspez. Status
-
Fahrsatznummer
Die Fahrsatznummer des zu startenden Fahrauftrags kann in den Bereichen 1 bis 180
(EEPROM-Fahraufträge) bzw. 192 bis 255 (RAM-Fahraufträge) liegen.
Sollgeschwindigkeit (v
soll
)
Nur für Tippbetrieb bzw. Referenzfahrt. PNU 1894 liefert den Multiplikator für diesen Wert,
siehe Kapitel 4.2.4.1.
Istdrehzahl (16 Bit)
Die Darstellung des 16 – Bit Drehzahlistwerts ist normiert auf den Parameter für die
Überdrehzahl VOSPD
n
n
VOSPD
2
ist16
ist
15
=
´
Istposition (32Bit)
Der Bereich für die inkrementelle Position umfasst Werte von -2
31
bis (2
31
-1).
Dabei entspricht eine Umdrehung 2
PRBASE
Inkrementen.
Herstellerspezifischer Status
In den Prozessdaten werden die oberen 16 Bits des herstellerspezifischen Statusregisters
(PNU 1002) zur Verfügung gestellt. Die Numerierung beginnt dabei wieder bei 0.
Bedeutungen der Statusregisterbits finden Sie in der Tabelle in Kapitel 4.2.3.3.
Sollgeschwindigkeit für den Direktfahrauftrag
Der nutzbare Bereich für die Geschwindigkeit wird nicht durch den zur Verfügung stehenden
Datenbereich begrenzt. Sie wird durch die maximale fahrbare Drehzahl nmax begrenzt, die
durch den Drehzahlparameter VLIM als Enddrehzahl für den Motor vorgegeben wurde.
Die maximale Geschwindigkeit ergibt sich nach folgender Formel:
v
n
PGEARI
PGEARO
2
SI, max
max
PRBASE
=
´
´
bzw. Als inkrementelle Größe nach:
v
n
2
250 s
1sek
n
4000
2
inkr. max.
max
PRBASE
max
PRBASE
=
´
´
=
´
m
, jeweils mit n
max
in U/sek
Sollposition für den Direktfahrauftrag
Der AX2000/2500 rechnet für alle Positioniervorgänge intern nur auf inkrementeller
Basis. Deshalb gibt es für Wege, die in SI – Einheiten angegeben werden sollen,
Einschränkungen im nutzbaren Wertebereich.
Der Bereich für die inkrementelle Position umfasst Werte von –2
31
bis 2
31
– 1.
Die durch die Parameter 1803 (PGEARO) und 1802 (PGEARI) festgelegte Auflösung und
die Variable PRBASE bestimmen den sinnvoll nutzbaren Bereich für Positioniervorgänge.
Die Variable PRBASE bestimmt über die Gleichung n = 2
PRBASE
die Anzahl der Inkremente
pro Motorumdrehung. Der Wert von PRBASE kann nur 16 oder 20 betragen.
PGEARO enthält die Anzahl der Inkremente die gefahren werden, wenn die zu fahrende
Strecke PGEARI beträgt. Die Defaultwerte für PGEARO sind 1048576 (PRBASE = 20)
bzw. 65536 (PRBASE = 16) und entsprechen einer Umdrehung.
Es ergeben sich für diese Einstellung folgende erfassbare Umdrehungen:
-2048 .. +2047
für PRBASE = 20 bzw. -32768 .. + 32767 für PRBASE = 16
Der sinnvoll nutzbare Positionsbereich erstreckt sich über den Bereich:
(
)
-
´
- ´
2
PGEARI
PGEARO
.. 2
1
PGEARI
PGEARO
31
31
für PGEARI
£ PGEARO bzw.
(
)
-
-
2 .. 2
1
31
31
für PGEARI > PGEARO.
Fahrsatzart
Die verschiedenen Fahrsatzarten werden in Kapitel 4.2.5.3 beschrieben.
38
PROFIBUS für AX2000/2500
Prozessdatenkanal
12/05
BECKHOFF