Abschnitt 2 – technische daten – Yaskawa VS-606V7 Benutzerhandbuch
Seite 10
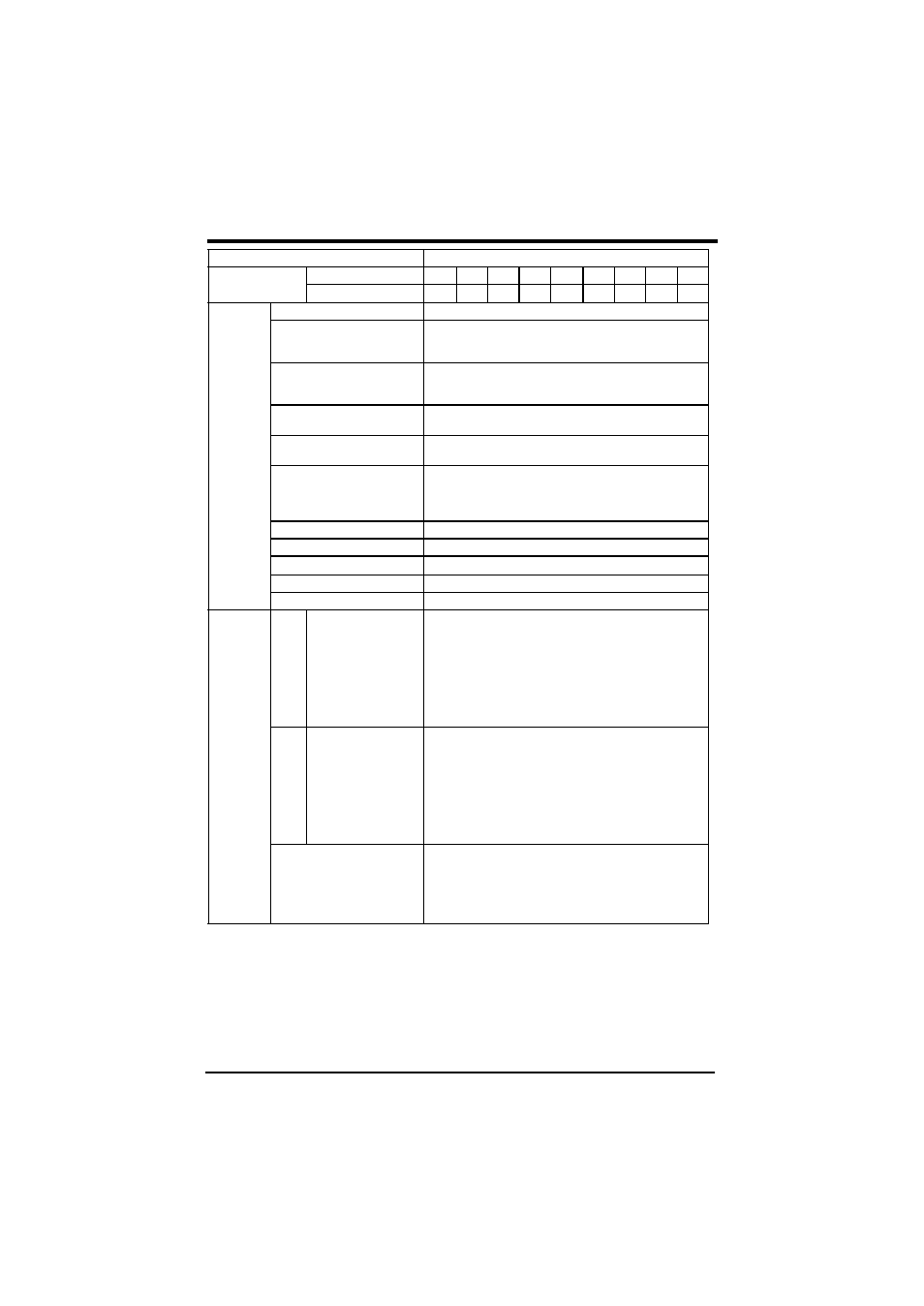
ABSCHNITT 2 – Technische Daten
10
VS-606V7 Bedienungsanleitung
Sc
hu
tz-
fu
nk
tio
ne
n
Motor-Überlastschutz
Elektronische Überlastrelais
kurzzeitiger Überlaststrom
Bei etwa 250 % des Frequenzumrichter-Nennstromes wird der
Umrichter sofort abgeschaltet und der Motor läuft dann ungebremst bis
zum Stillstand aus.
Überlast
Nach 1 Minute Betrieb mit 150 % des Nennausgangsstromes des
Frequenzumrichters wird der Umrichter ausgeschaltet und der Motor
läuft dann ungebremst bis zum Stillstand aus.
Überspannung
Überschreitet die Zwischenkreisspannung 410 V, erfolgt
Störabschaltung.
Unterspannung
Unterschreitet die Zwischenkreisspannung 200 V (bei einphasigen
Geräten etwa 160 V), erfolgt Störabschaltung.
Kurzfristiger Spannungsausfall
Es sind die folgenden Verhaltensweisen einstellbar: keine Reaktion (Der
Frequenzumrichter wird abgeschaltet, wenn die Spannung mehr als
15ms ausfällt); kontinuierlicher Betrieb, wenn der Spannungsausfall 0,5 s
nicht überschreitet; kontinuierlicher Betrieb
Überhitzung des Leistungsteils
Durch eine elektronische Schaltung geschützt.
Kippschutzgrenzwert
Kann für Hoch/Tieflauf getrennt eingestellt werden.
Ausfall des Lüfters
Durch eine elektronische Schaltung geschützt.(Kippschutz des Lüfters)
Erdschluß
Durch eine elektronische Schaltung geschützt.)
Ladeanzeige
EIN bei einer Zwischenkreisspannung von mehr als 50 V.
So
ns
tig
e
Fu
nk
tio
ne
n
Ei
ng
an
gs
sig
na
le
Multifunktionseingang
Es lassen sich sieben der folgenden Eingangssignale wählen:
Rechtslauf/Linkslauf (3-Leitersequenz); Fehlerreset; externer Fehler
(Ruhe/Arbeitskontakteingang), Multischritt-Drehzahlbetrieb; Tipbetrieb;
gewählte Hoch-/Tieflaufzeit; externer Baseblock (Ruhe/
Arbeitskontakteingang); Befehl Drehzahl erfassen; Befehl Hochlauf-/
verzögerung halten; Wahl von Vorort-/Fernsteuerung; Wahl der
Klemmen für den Kommunikations-/Steuerkreis; Notaus-Fehler,
Notaus-Alarm; Befehl AUF/AB; Selbsttest; PID-Regler abbrechen; PID
Integral Reset/Halten
Au
sg
an
gs
sig
na
le
Multifunktionsausgang
Es lassen sich die folgenden Ausgangssignale wählen (1 Ruhe/
Arbeitskontakt 2 Optokopplerausgänge) : Fehler; Betrieb; Drehzahl Null;
Mit der Frequenz; Erfassung der Frequenz (Ausgangsfrequenz
≤
oder
≥
Sollwert); während Überdrehmomenterfassung, während der
Unterspannungserfassung; kleiner Fehler; während des Baseblocks;
Betriebsart; Frequenzumrichterbetrieb fertig, bei Fehler-
Neustartversuch, bei Unterspannung; bei Drehzahlerfassung,
Datenausgabe über die Kommunikationsleitung; Erfassung des
Verlustes des Rückmeldesignals bei dem PID-Regler
Standardfunktionen
Spannungsvektorregelung; automatische Drehmomentanhebung über
den gesamten Bereich; Schlupfregelung; DC-Bremsung Strom/Zeit bei
Start/Stop Frequenzbezug Bias/Verstärkung; MEMOBUS-
Kommunikation (RS-485/422, max. 19,2 kps); PID-Regler;
Energiesparbetrieb; Kopieren der Parameter; Wahl der Einheit für die
Frequenzeinstellung/Anzeige
Spannungsbereich
200 V ein- /dreiphasig
Typ
CIMR-V7*Cqqqq
3-phasig
20P1 20P2 20P4 20P7 21P5 22P2 24P0 25P5 27P5
1-phasig
B0P1 B0P2 B0P4 B0P7 B1P5 B2P2 B4P0
–
–