Karteireiter "pdo – BECKHOFF FC5101 Benutzerhandbuch
Seite 32
Eiserstraße 5 / D-33415 Verl / Telefon 05246/963-0 / Telefax 05246/963-149
32
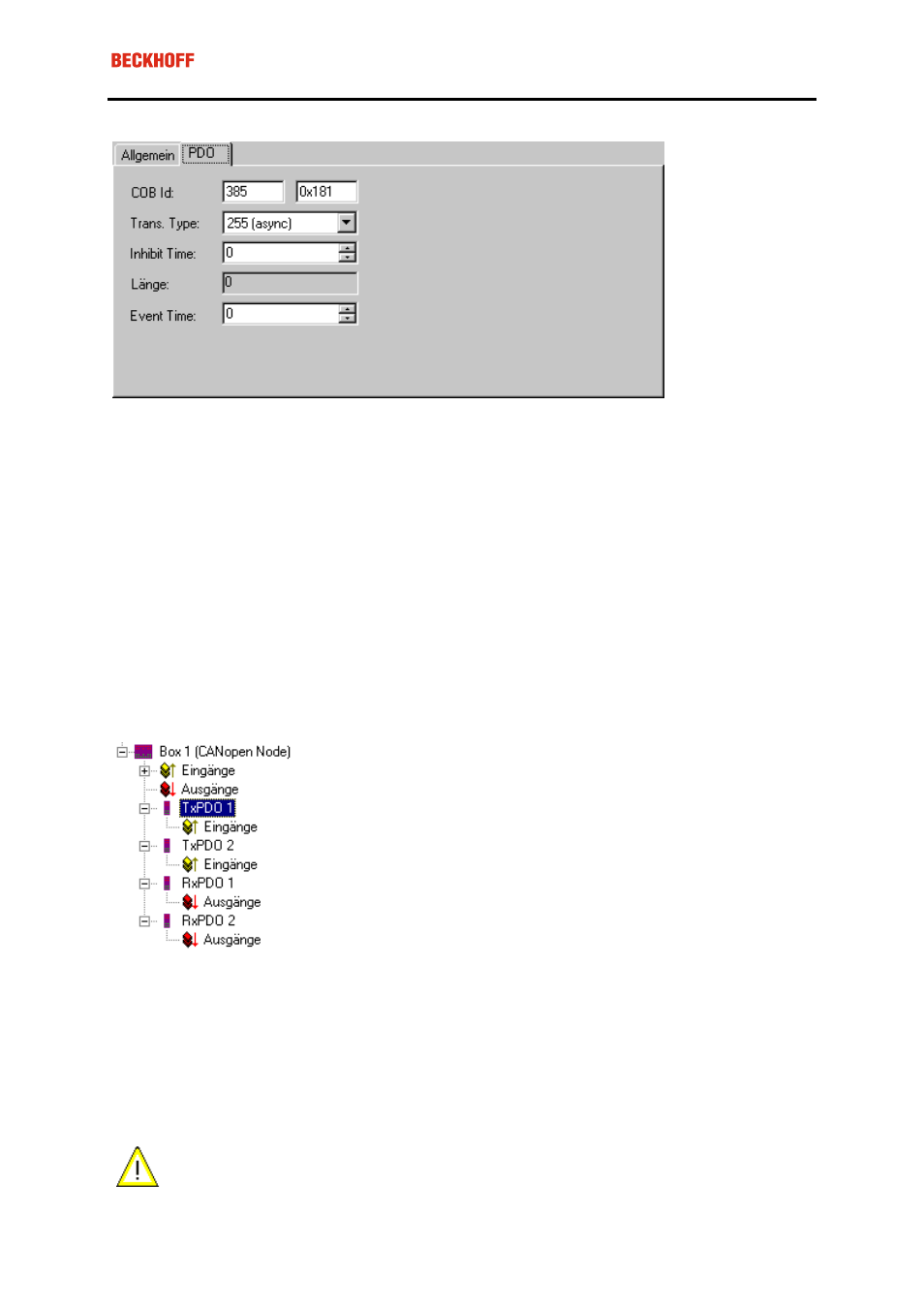
Karteireiter "PDO"
COB Id: Der CAN-Identifier dieses PDOs. Für jeweils zwei Sende- und Empfangs-PDOs je Knoten stellt CA-
Nopen Default-Identifier zur Verfügung. Diese können dann geändert werden.
Trans.Type: Der Transmission Type bestimmt das Sendeverhalten des PDOs. 255 entspricht dem ereignisge-
steuerten Senden.
Inhibit Time: Sendeverzögerung zwischen zwei gleichen PDOs. Wird in Vielfachen von 0,1 ms angegeben.
Length: Die Länge des PDOs ergibt sich aus den gemappten Variablen und kann daher hier nicht editiert wer-
den.
Event Time (nur FC510x): Hier wird der Wert für den Event Timer in ms eingetragen. Bei Sende-PDOs (hier:
RxPDOs, siehe oben) löst der Ablauf dieses Timers ein zusätzliches Senden des PDOs aus, bei Empfangs-
PDOs (hier: TxPDOs) wird das Eintreffen eines PDOs innerhalb des eingestellten Wertes überwacht und ggf.
der Box-State des Knotens verändert. Bei 0 wird der Parameter nicht zum Knoten übertragen.
TwinCAT erzeugt aus den hier eingegebenen Parametern entsprechende Einträge im Objektverzeichnis des
Knotens, die beim Systemstart über SDO übertragen werden. Die Einträge können beim Karteireiter SDOs
eingesehen werden. Ist dieses Verhalten unerwünscht, so kann es über die Checkbox "Auto-Download der
PDO Parameter" beim Karteireiter CAN Node deaktiviert werden.
Baumdarstellung:
TwinCAT sieht für einen allgemeinen CANopen-Knoten zunächst je zwei Sende- und Empfangs-PDOs vor, die
mit Default-Identifiern versehen sind. Überzählige PDOs können angewählt und entfernt werden.
TxPDOs werden vom CANopen Knoten gesendet und enthalten im allgemeinen Fall Eingänge. RxPDOs wer-
den vom Knoten empfangen, also von TwinCAT gesendet
Die PDOs werden mit Variablen gefüllt, indem man "Eingänge" bzw. "Ausgänge" mit der rechten Maustaste
anklickt und die entsprechende(n) Variablen auswählt. Werden mehrere Variablen des gleichen Typs mit einer
Aktion eingefügt, so wird der Offset innerhalb des PDOs automatisch erzeugt. Werden Variablen hintereinander
eingefügt, so ist der entsprechende Offset (Start-Adresse innerhalb des CAN-Telegramms) für jede Variable
einzustellen.
Achtung: TwinCAT ordnet die PDOs der angezeigten Reihenfolge nach den Objektverzeichniseinträgen
im Knoten zu. So werden z.B. die PDO Kommunikationsparameter des dritten aufgelisteten TxPDOs stets auf