Ereignisgesteuert, Gepollt, Synchronisiert – BECKHOFF FC5101 Benutzerhandbuch
Seite 44
Eiserstraße 5 / D-33415 Verl / Telefon 05246/963-0 / Telefax 05246/963-149
44
.
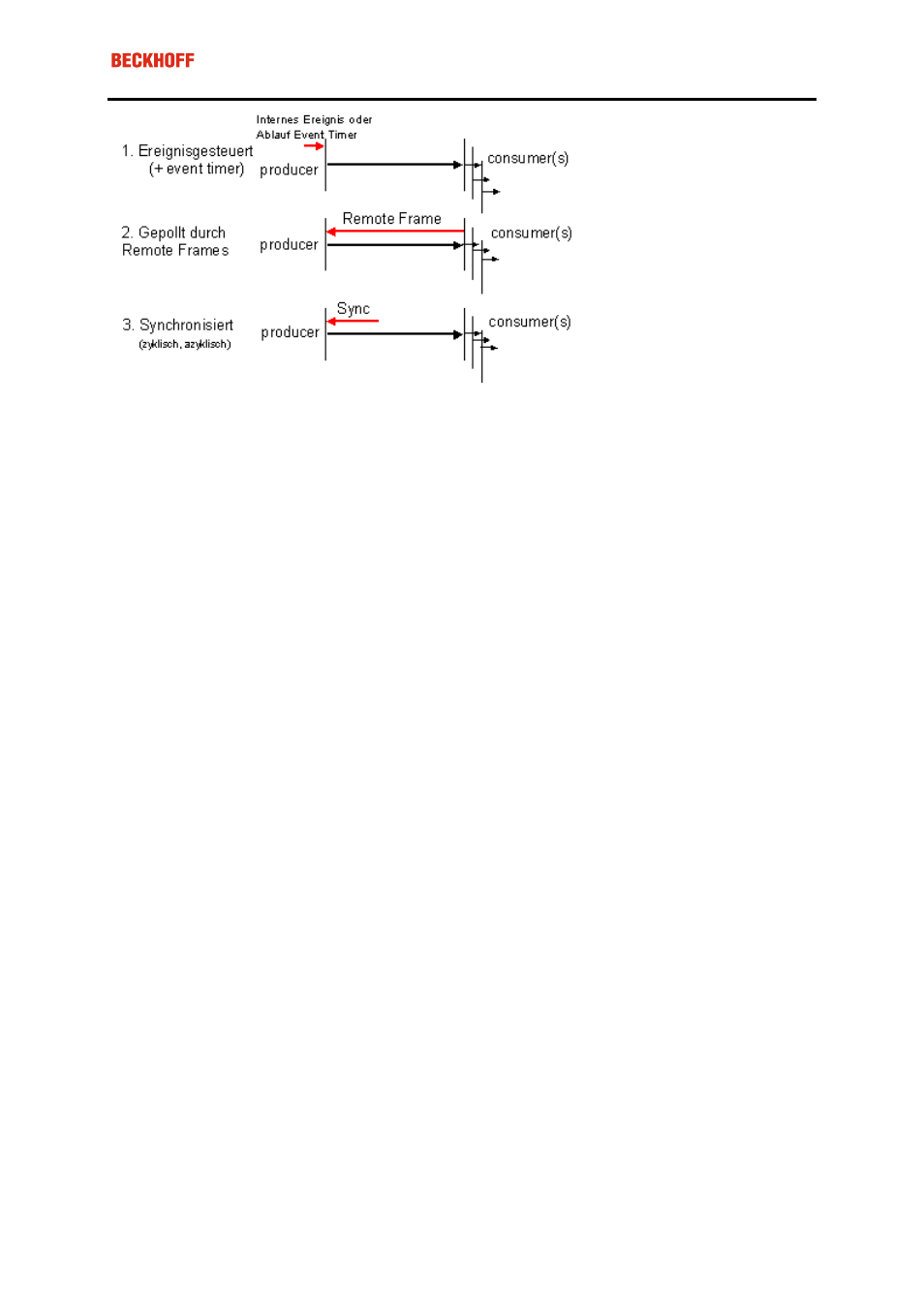
Ereignisgesteuert
Das "Ereignis" ist die Änderung eines Eingangswertes, die Daten werden sofort nach dieser Änderung ver-
schickt. Durch die Ereignissteuerung wird die Busbandbreite optimal ausgenutzt, da nicht ständig das Prozess-
abbild, sondern nur die Änderung desselben übertragen wird. Gleichzeitig wird eine kurze Reaktionszeit er-
reicht, da bei Änderung eines Eingangswertes nicht erst auf die nächste Abfrage durch einen Master gewartet
werden muss.
Ab CANopen Version 4 kann die ereignisgesteuerte Kommunikationsart mit einem zyklischen Update kombi-
niert werden. Auch wenn gerade kein Ereignis aufgetreten ist, werden ereignisgesteuerte TxPDO nach Ablauf
des Event Timers verschickt. Beim Auftreten eines Ereignisses wird der Event Timer zurückgesetzt. Bei
RxPDOs wird der Event Timer als Watchdog benutzt um das Eintreffen von ereignisgesteuerten PDOs zu ü-
berwachen. Sollte innerhalb der eingestellten Zeit kein PDO eingetroffen sein, so geht der Busknoten in den
Fehlerzustand.
Gepollt
Die PDOs können auch durch Datenanforderungstelegramme (Remote Frames) gepollt werden. Auf diese Art
kann etwa das Eingangsprozessabbild bei ereignisgesteuerten Eingängen auch ohne deren Änderung auf den
Bus gebracht werden, beispielsweise bei einem zur Laufzeit ins Netz aufgenommenen Monitor- oder Diagno-
segerät. Das zeitliche Verhalten von Remote Frame und Antworttelegramm hängt von den verwendeten CAN-
Controllern ab (Bild8): Bausteine mit integrierter kompletter Nachrichtenfilterung ("FullCAN") beantworten ein
Datenanforderungstelegramm in der Regel direkt und versenden sofort die im entsprechenden Sendebuffer
stehenden Daten - dort muss die Applikation dafür Sorge tragen, dass die Daten ständig aktualisiert werden.
CAN-Controller mit einfacher Nachrichtenfilterung (BasicCAN) reichen die Anforderung dagegen an die Appli-
kation weiter, die nun das Telegramm mit den aktuellen Daten zusammenstellen kann. Das dauert länger, dafür
sind die Daten aktuell. Beckhoff verwendet CAN Controller nach dem Basic CAN Prinzip.
Da dieses Geräteverhalten für den Anwender meist nicht transparent ist und zudem noch CAN-Controller in
Verwendung sind, die Remote Frames überhaupt nicht unterstützen, kann die gepollte Kommunikationsart nur
bedingt für den laufenden Betrieb empfohlen werden.
Synchronisiert
Nicht nur bei Antriebsanwendungen ist es sinnvoll, das Ermitteln der Eingangsinformation sowie das Setzen
der Ausgänge zu synchronisieren. CANopen stellt hierzu das SYNC-Objekt zur Verfügung, ein CAN-
Telegramm hoher Priorität ohne Nutzdaten, dessen Empfang von den synchronisierten Knoten als Trigger für
das Lesen der Eingänge bzw. für das Setzen der Ausgänge verwendet wird.