12 elektronisches getriebe, master-slave betrieb, Schnittstelle master-slave, Master-slave – BECKHOFF AX2040 Benutzerhandbuch
Seite 56: Elektronisches getriebe, master-slave betrieb, S.56, Beckhoff
8.12
Elektronisches Getriebe, Master-Slave Betrieb
Mit der Funktionalität "Elektronisches Getriebe" (siehe Inbetriebnahme-Software und Parameterbe-
schreibung GEARMODE) wird der Servoverstärker von einem sekundären Feedback als "Folger"
gesteuert. Weitere Informationen finden Sie ind er Online-Hilfe der Inbetriebnahme-Software.
Sie können Master-Slave Systeme aufbauen, einen externen Encoder als Sollwertgeber benutzen
oder den Verstärker an eine Schrittmotor-Steuerung anschließen. Der Verstärker wird mit Hilfe der
Inbetriebnahmesoftware parametriert (elektronisches Getriebe). Die Auflösung (Impulszahlen/
Umdrehung) ist einstellbar.
Primäres Feedback:
Einstellen auf Bildschirmseite "Feedback" (FBTYPE)
Sekundäres Feedback:
Einstellen auf Bildschirmseite "Lageregler" und "El. Getriebe" (EXTPOS, GEARMODE)
Master-/Slaveeinstellung
Master: Encoderemulation auf Bildschirmseite "ROD/SSI/Encoder" einstellen (ENCMODE)
Slave: Bildschirmseite "Lageregler" und "El. Getriebe" (EXTPOS, GEARMODE)
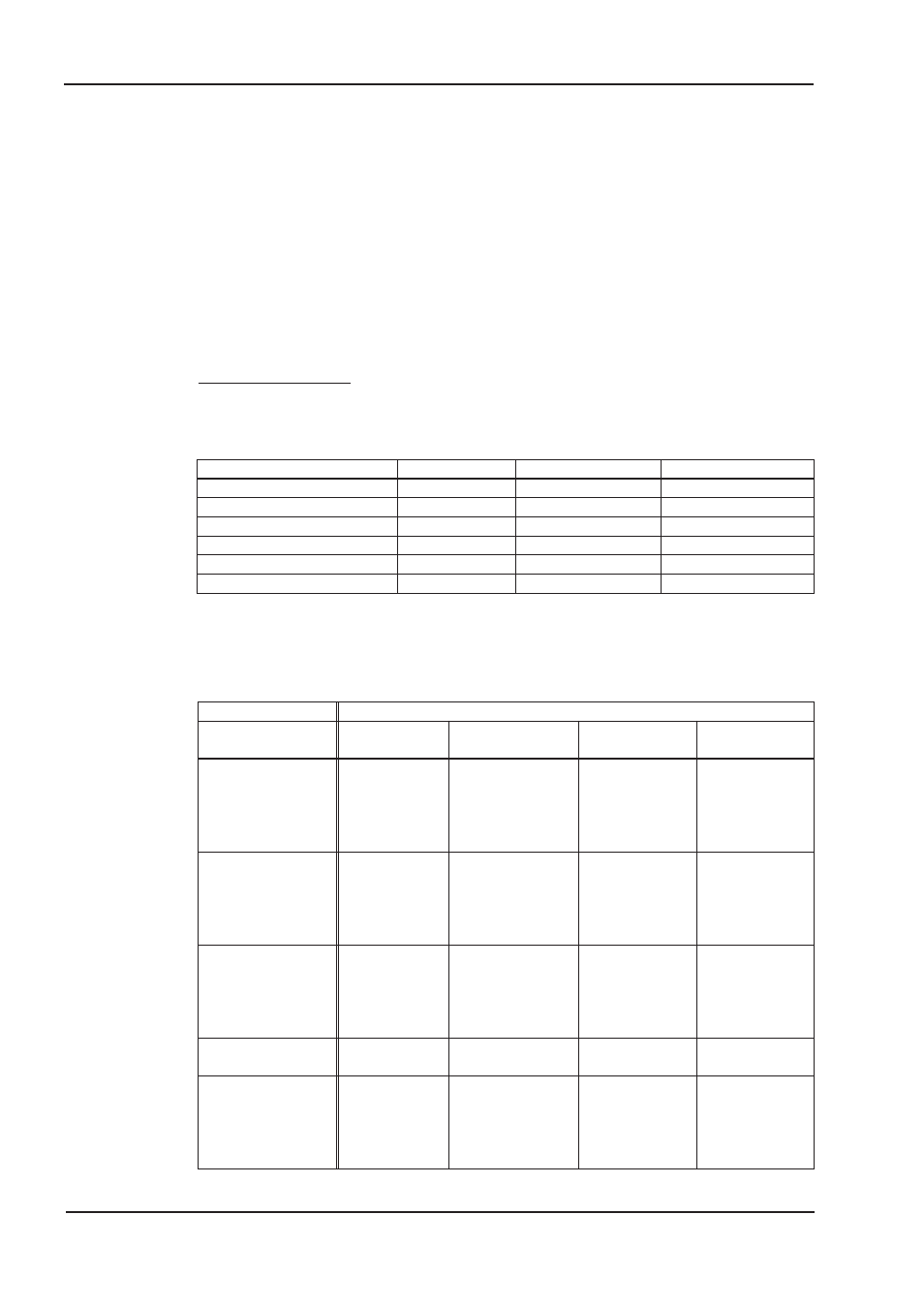
Als externe Geber können folgende Typen verwendet werden:
Sekundärer Feedback-Typ
Stecker
Anschlussplan
GEARMODE
ROD** Encoder 5V
X5
ð S.57
3, 5*, 13*, 15*
ROD Encoder 24V
X3
ð S.57
0, 2*, 10*, 12*
Sinus/Cosinus Encoder
X1
ð S.58
6, 8*, 9*, 16*
SSI Encoder
X5
ð S.59
7*, 17*
Puls/Richtung 5V
X5
ð S.60
4, 14*
Puls/Richtung 24V
X3
ð S.60
1, 11*
* einstellbar nur im Terminalfenster der Inbetriebnahme-Software
** ROD ist ein Kürzel für Inkrementalgeber
Die folgende Tabelle zeigt erlaubte Kombinationen von primären/sekundären Feedbacksystemen:
Sekundäres Feedback für Lageregelung/Führung
Primäres Feedback
Sinus Encoder
(X1)
ROD Encoder
5V/24V (X5/X3)
Puls/Richtung
5V/24V (X5/X3)
SSI Encoder
(X5)
Resolver (X2)
FBTYPE = 0
EXTPOS = 1,2,3
GEARMODE =
6,8,9,16
FPGA = 0
ENCMODE = 0
EXTPOS = 1,2,3
GEARMODE =
0,2,3,5,10,12,13,15
FPGA = 0
ENCMODE = 0
EXTPOS = 1,2,3
GEARMODE =
1,4,11,14
FPGA = 0
ENCMODE = 0
EXTPOS = 1,2,3
GEARMODE =
7,17
FPGA = 1
ENCMODE = 2
Sinus Encoder (X1)
FBTYPE = 2,4,6,7,20
-
EXTPOS = 1,2,3
GEARMODE =
0,2,3,5,10,12,13,15
FPGA = 1
ENCMODE = 0
EXTPOS = 1,2,3
GEARMODE =
1,4,11,14
FPGA = 1
ENCMODE = 0
EXTPOS = 1,2,3
GEARMODE =
7,17
FPGA = 1
ENCMODE = 2
Encoder & Hall (X1)
FBTYPE = 11,12
-
EXTPOS = 1,2,3
GEARMODE =
0,2,3,5,10,12,13,15
FPGA = 1
ENCMODE = 0
EXTPOS = 1,2,3
GEARMODE =
1,4,11,14
FPGA = 1
ENCMODE = 0
-
ROD Encoder (X5)
FBTYPE = 8,9
-
-
-
-
Sensorless
FBTYPE = 10
-
EXTPOS = 1,2,3
GEARMODE =
0,2,3,5,10,12,13,15
FPGA = 0
ENCMODE = 0
EXTPOS = 1,2,3
GEARMODE =
1,4,11,14
FPGA = 0
ENCMODE = 0
EXTPOS = 1,2,3
GEARMODE =
7,17
FPGA = 1
ENCMODE = 2
56
AX2040/2070 Produkthandbuch
Elektrische Installation
06/2007
BECKHOFF