8 beseitigung von störungen, Beseitigung von störungen, Beckhoff – BECKHOFF AX2040 Benutzerhandbuch
Seite 94
9.8
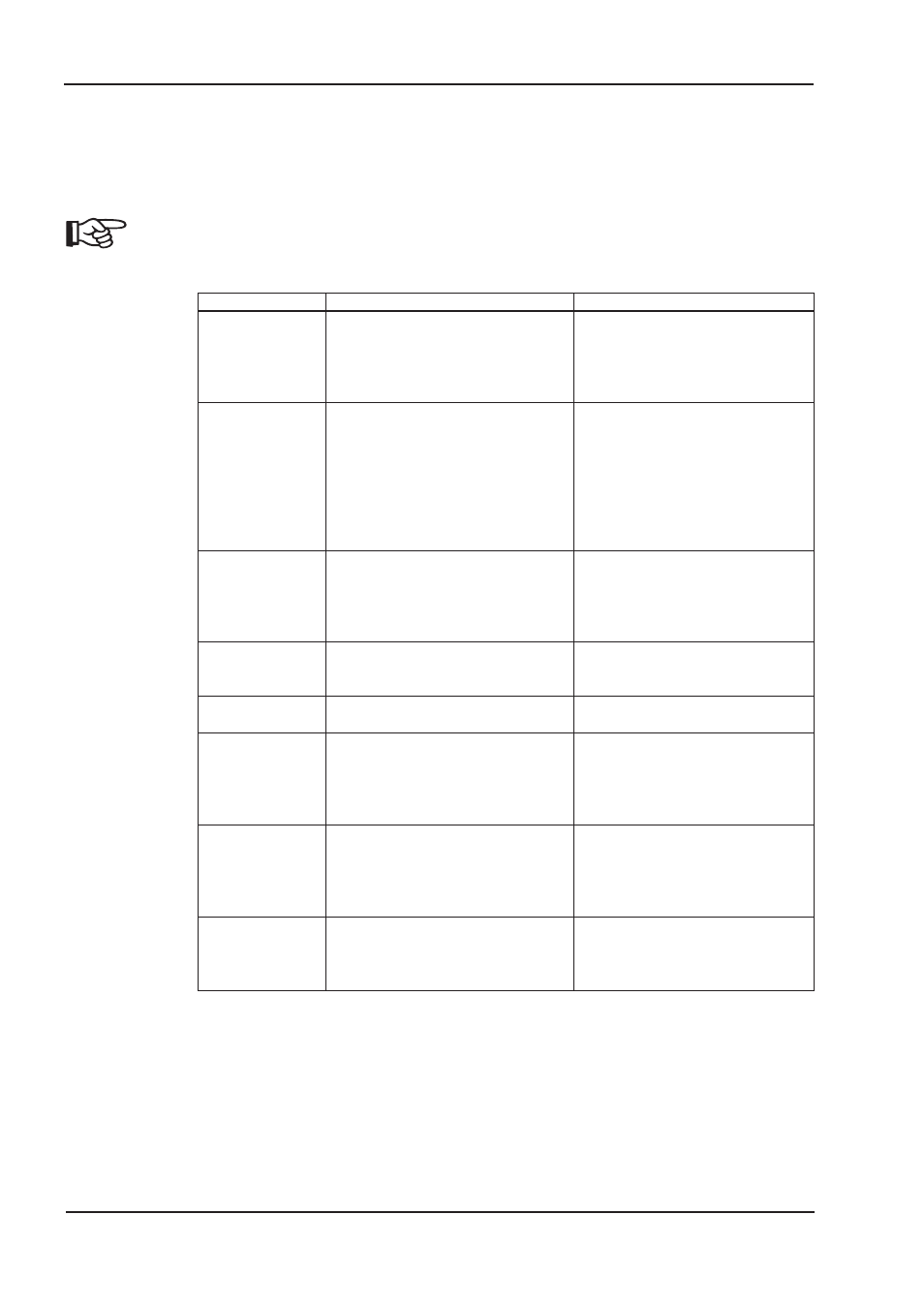
Beseitigung von Störungen
Abhängig von den Bedingungen in Ihrer Anlage können vielfältige Ursachen für die auftretende
Störung verantwortlich sein. Bei Mehrachssystemen können weitere versteckte Fehlerursachen vor-
liegen.
Detaillierte Beschreibung von Fehlerursachen und Tipps zur Behebung finden Sie
im Abschnitt "Trouble-Shooting" in der Online-Hilfe der Inbetriebnahme-Software.
Unsere Applikationsabteilung hilft Ihnen bei Problemen weiter.
Fehler
mögliche Fehlerursachen
Maßnahmen
Fehlermeldung
Kommunikations-
störung
— falsche Leitung verwendet
— Leitung auf falschen Steckplatz am
Servoverstärker oder PC gesteckt
— falsche PC-Schnittstelle gewählt
— Nullmodem-Leitung verwenden
— Leitung auf richtige Steckplätze
am Servoverstärker und am PC
stecken
— Schnittstelle korrekt anwählen
Motor dreht nicht
— Servoverstärker nicht freigegeben
— Sollwertleitung unterbrochen
— Motorphasen vertauscht
— Bremse ist nicht gelöst
— Antrieb ist mechanisch blockiert
— Motorpolzahl nicht korrekt
eingestellt
— Rückführung falsch eingestellt
— ENABLE-Signal anlegen
— Sollwertleitung prüfen
— Motorphasen korrekt auflegen
— Bremsenansteuerung prüfen
— Mechanik prüfen
— Parameter Motorpolzahl einstellen
— Rückführung korrekt einstellen
Motor schwingt
— Verstärkung zu hoch (Drehzahl-
regler)
— Abschirmung Rückführleitung
unterbrochen
— AGND nicht verdrahtet
— Kp (Drehzahlregler) verkleinern
— Rückführleitung erneuern
— AGND mit CNC-GND verbinden
Antrieb meldet
Schleppfehler
— I
rms
bzw. I
peak
zu klein eingestellt
— Sollwertrampe zu groß
— I
rms
bzw. I
peak
vergrößern
(Motordaten beachten !)
— SW-Rampe +/- verkleinern
Motor wird zu
heiß
— I
rms
/I
peak
zu groß eingestellt
— I
rms
/I
peak
verkleinern
Antrieb zu weich
— Kp (Drehzahlregler) zu klein
— Tn (Drehzahlregler) zu groß
— PID-T2 zu groß
— T-Tacho zu groß
— Kp (Drehzahlregler) vergrößern
— Tn (Drehzahlregler), Motor-
defaultwert
— PID-T2 verkleinern
— T-Tacho verkleinern
Antrieb läuft rauh
— Kp (Drehzahlregler) zu groß
— Tn (Drehzahlregler) zu klein
— PID-T2 zu klein
— T-Tacho zu klein
— Kp (Drehzahlregler) verkleinern
— Tn (Drehzahlregler), Motor-
defaultwert
— PID-T2 vergrößern
— T-Tacho vergrößern
Achse driftet bei
Sollwert=0V
— Offset bei analoger Sollwert-
vorgabe nicht korrekt abgeglichen
— AGND nicht mit CNC-GND der
Steuerung verbunden
— SW-Offset (Analog I/O)
abgleichen
— AGND und CNC-GND verbinden
94
AX2040/2070 Produkthandbuch
Inbetriebnahme
06/2007
BECKHOFF