I - 1 grundlagen für positionsangaben, Koordinatensysteme, I – 1 grundlagen für positionsangaben – HEIDENHAIN PT 880 Benutzerhandbuch
Seite 12
12
I Benutzer-Anleitung
I – 1 Gr
undlag
e
n für P
o
sitionsang
aben
I – 1 Grundlagen für
Positionsangaben
Koordinatensysteme
Um Positionen angeben zu können, braucht man grundsätzlich ein
Bezugssystem.
Beispielsweise können Orte auf der Erde durch ihre geographischen
Koordinaten „Länge“ und „Breite“ absolut angegeben werden. Im
Gegensatz zu einer relativen Positionsangabe, die auf einen
bekannten Ort bezogen ist, stellt das Netz der Längen- und
Breitenkreise ein absolutes Bezugssystem dar. Siehe Abb. I.1.
Zur Bearbeitung eines Werkstücks auf einer Fräsmaschine geht man
von einem werkstückfesten kartesischen (rechtwinkligen, nach dem
französischen Mathematiker und Philosophen Renatus Cartesius;
1596 bis 1650) Koordinatensystem aus. Das kartesische
Koordinatensystem besteht aus den drei, zu den Maschinenachsen
parallelen Koordinatenachsen X, Y und Z.
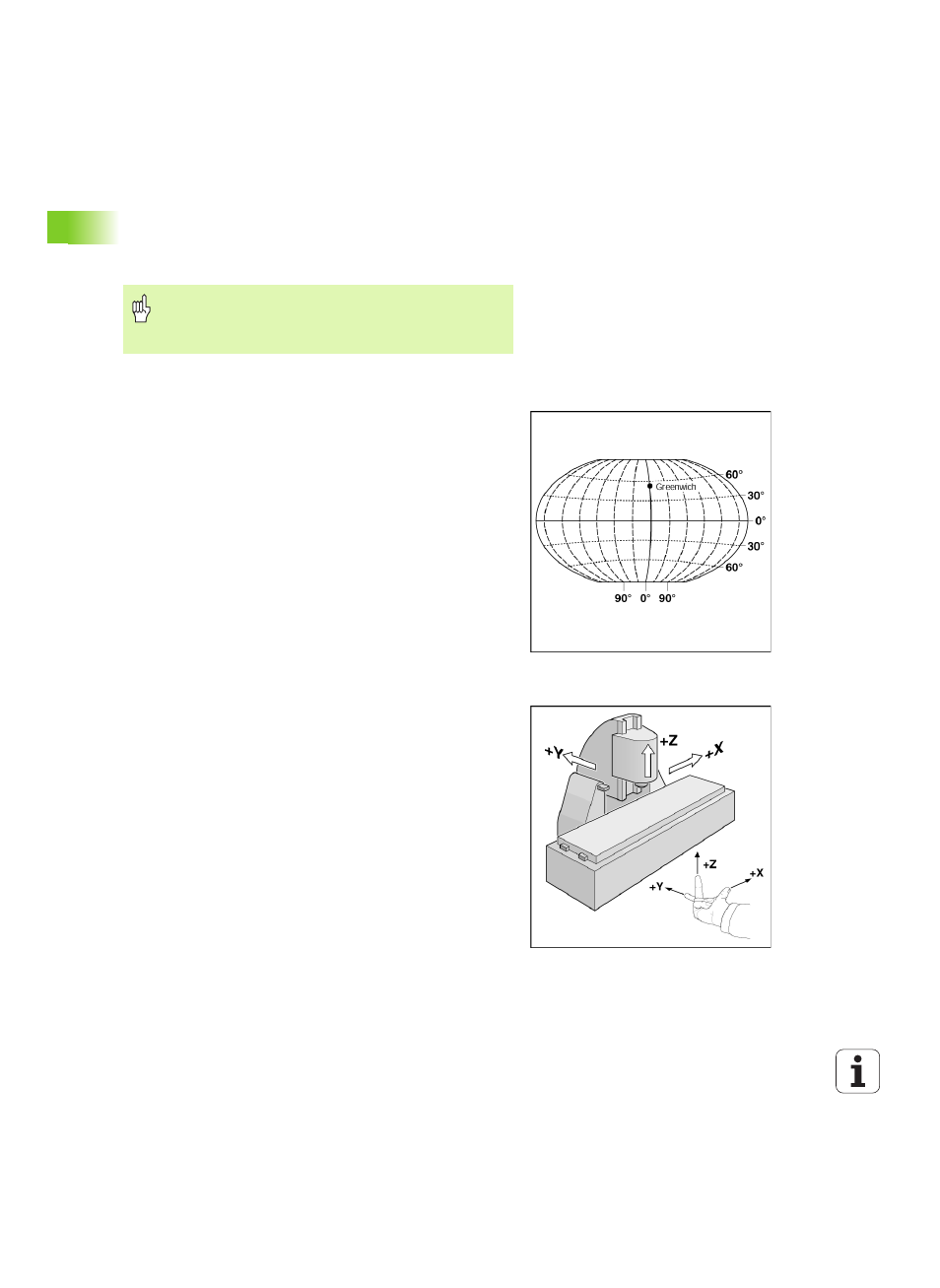
Die rechts unten (Abb. I.2) dargestellte Drei-Finger-Regel
veranschaulicht die drei Achsrichtungen: Denkt man sich den
Mittelfinger der rechten Hand in Richtung der Werkzeugachse vom
Werkstück zum Werkzeug zeigend, so weist er in Richtung der
positiven Z-Achse, der Daumen in Richtung der positiven X-Achse und
der Zeigefinger in Richtung der positiven Y-Achse.
Wenn Sie mit den Begriffen Koordinatensystem,
Inkrementalmaß, Absolutmaß, Soll-Position, Ist-Position
und Restweg vertraut sind, können Sie dieses Kapitel
überspringen.
Abb. I.1 Das geographische Koordinatensystem
stellt ein absolutes Bezugssystem dar.
Abb. I.2 Benennungen und Richtungen der
Maschinenachsen an einer Fräsmaschine