Einführung, Seite 520 – HEIDENHAIN iTNC 530 (34049x-08) Benutzerhandbuch
Seite 520
520
Programmieren: Mehrachsbearbeitung
12.6 Dr
eidimensionale W
er
kz
eug-K
or
rekt
ur (Sof
tw
ar
e-Option 2)
12.6 Dreidimensionale Werkzeug-
Korrektur (Software-Option 2)
Einführung
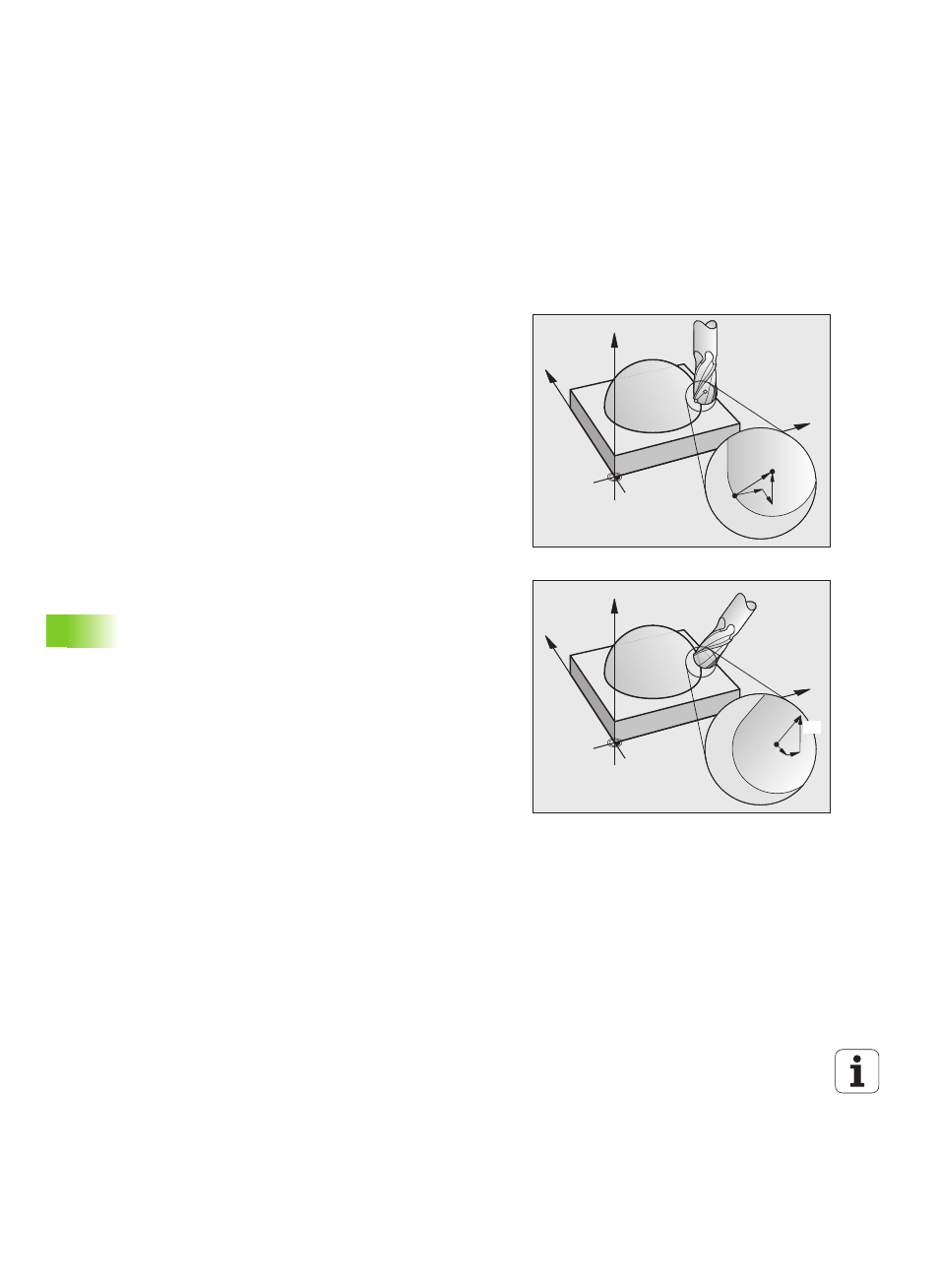
Die TNC kann eine dreidimensionale Werkzeug-Korrektur (3D-
Korrektur) für Geraden-Sätze ausführen. Neben den Koordinaten X,Y
und Z des Geraden-Endpunkts, müssen diese Sätze auch die
Komponenten NX, NY und NZ des Flächen-Normalenvektors (siehe
„Definition eines normierten Vektors” auf Seite 521) enthalten.
Wenn Sie darüber hinaus noch eine Werkzeug-Orientierung oder eine
dreidimensionale Radiuskorrektur durchführen wollen, müssen diese
Sätze zusätzlich noch einen normierten Vektor mit den Komponenten
TX, TY und TZ enthalten, der die Werkzeug-Orientierung festlegt
(siehe „Definition eines normierten Vektors” auf Seite 521).
Der Geraden-Endpunkt, die Komponenten der Flächennormalen und
die Komponenten für die Werkzeug-Orientierung müssen Sie von
einem CAM-System berechnen lassen.
Einsatz-Möglichkeiten
Einsatz von Werkzeugen mit Abmessungen, die nicht mit den vom
CAM-System berechneten Abmessungen übereinstimmen (3D-
Korrektur ohne Definition der Werkzeug-Orientierung)
Face Milling: Korrektur der Fräsergeometrie in Richtung der
Flächennormalen (3D-Korrektur ohne und mit Definition der
Werkzeug-Orientierung). Zerspanung erfolgt primär mit der
Stirnseite des Werkzeugs
Peripheral Milling: Korrektur des Fräserradius senkrecht zur
Bewegungsrichtung und senkrecht zur Werkzeugrichtung
(dreidimensionale Radiuskorrektur mit Definition der Werkzeug-
Orientierung). Zerspanung erfolgt primär mit der Mantelfläche des
Werkzeugs
Z
Y
X
P
T
NZ
P
NX
NY
Z
Y
X
TX
TY
TZ