Abgeleitetes signal für die mechanische leistung, Auswahl des stabilisierungssignals, Torsionsfilter – Basler Electric DECS-250 Benutzerhandbuch
Seite 120: Netzstabilisator decs-250
104
9440375990 Rev H
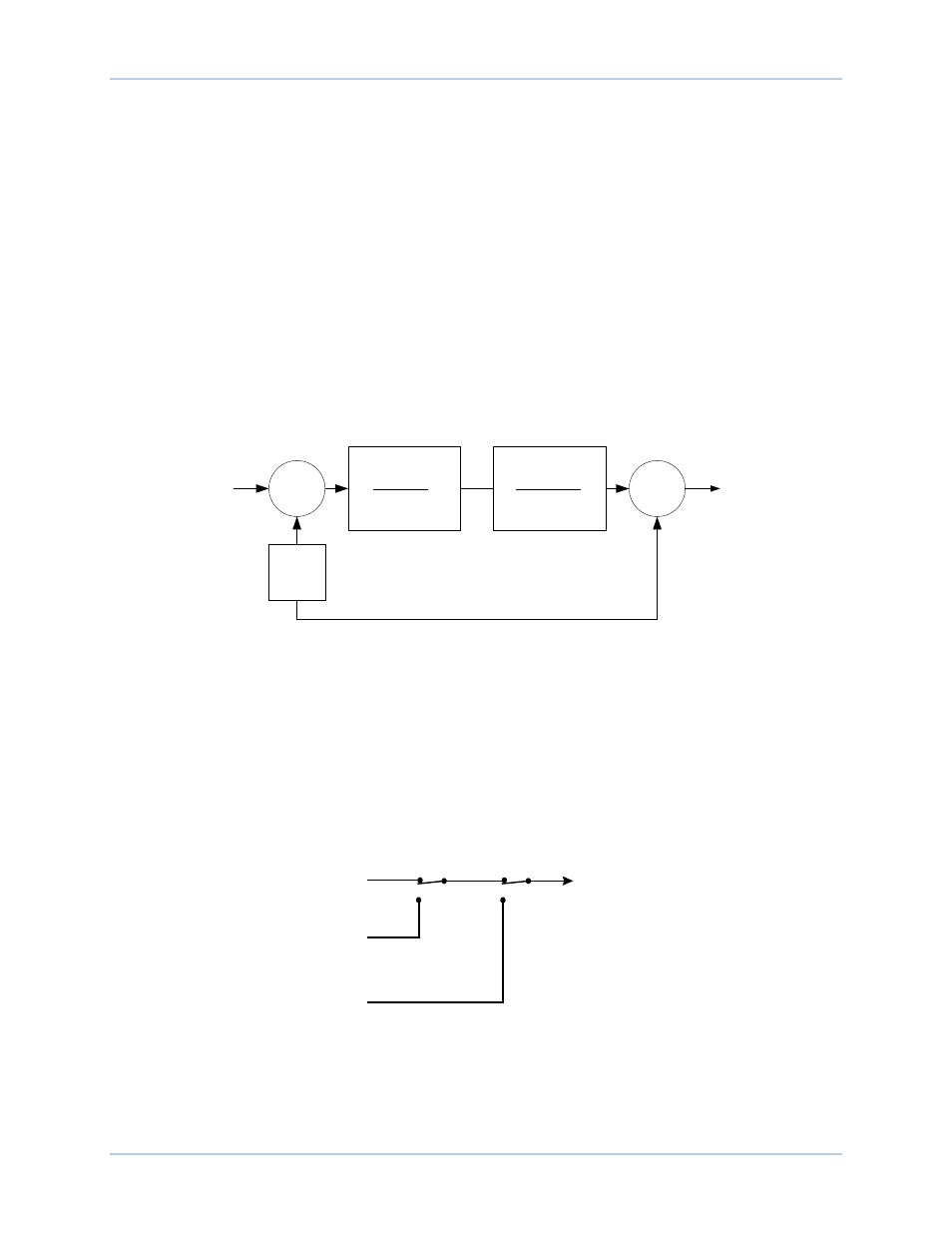
Abgeleitetes Signal für die mechanische Leistung
Das Drehzahlabweichungssignal und das Integral der Abweichung der elektrischen Leistung werden
kombiniert, um ein abgeleitetes Integral der mechanischen Leistung zu erzeugen.
Eine einstellbare Verstärkungsstufe Kpe
Q
, etabliert die Amplitude des Eingangs der elektrischen Leistung,
der durch die PSS Funktion verwendet wird.
Das abgeleitete Signal der mechanischen Leistung wird dann durch einen Tiefpassfilter für mechanische
Leistung und einen Rampenverfolgungsfilter geleitet. Der Tiefpassfilter wird durch die Zeitkonstante TI3
R
bestimmt und bietet Dämpfung von Torsionskomponenten, die im Eingangspfad der Drehzahl auftreten.
Der Rampenverfolgungsfilter produziert eine Null-Regelabweichung für Rampenänderungen im Integral
des Eingangssignals der elektrischen Leistung. Dies begrenzt die Ausgangsänderung des Stabilisators
auf sehr niedrige Pegel für Änderungsraten der mechanischen Leistung, denen man normalerweise beim
Betrieb von Versorgungsnetzgeneratoren begegnet. Der Rampenverfolgungsfilter wird durch die
Zeitkonstante Tr
S
gesteuert. Ein Exponent, der aus einem Zähler
T
und Nenner
U
besteht, wird an den Filter
für mechanische Leistung angelegt.
Die Verarbeitung des abgeleiteten Integrals des Signals der mechanischen Leistung wird in Abbildung 87
dargestellt.
Abbildung 87. Abgeleitetes Signal für die mechanische Leistung
Auswahl des Stabilisierungssignals
Abbildung 88 zeigt, wie die Softwareschalter SSW 2
V
und SSW 3
W
verwendet werden, um das
Stabilisierungssignal auszuwählen. Die abgeleitete Drehzahlabweichung wird als stabilisierendes Signal
ausgewählt, wenn die Einstellung für SSW 2 auf 'abgeleitete Drehzahl' steht und die Einstellung für SSW
3 auf 'abgeleitete Frequenz/Drehzahl'. Die ausgespülte Drehzahl wird als stabilisierendes Signal
ausgewählt, wenn die Einstellung für SSW 2 auf 'Frequenz' steht und die Einstellung für SSW 3 auf
'abgeleitete Frequenz/Drehzahl'. Die ausgespülte Leistung wird als stabilisierendes Signal verwendet,
wenn die Einstellung für SSW 3 auf 'Leistung' steht. (Wenn SSW 3 auf Leistung steht, hat die Einstellung
für SSW 2 keinen Effekt.)
Abbildung 88. Auswahl des Stabilisierungssignals
Torsionsfilter
Zwei Torsionsfilter, dargestellt in Abbildung 89, stehen nach dem Stabilisierungssignal und vor den
Blöcken zur Phasenkompensation zur Verfügung. Die Torsionsfilter liefern die gewünschte Reduzierung
Σ
Σ
+
+
K
PE
Ausgespülte
Drehzahl
Abgeleitete
Drehzahl-
abweichung
P0026-15
(
)
N
M
L
sT
−
+
3
1
1
N
L
R
sT
sT
+
+
3
1
1
P0026-19
12-09-04
Abgeleitete
Drehzahl-
abweichung
SSW 2
Ausgespülte
Drehzahl
SSW 3
Stabilisierungs-
signal
Ausgespülte
Leistung
Netzstabilisator
DECS-250