Nichtlineare achsfehler-kompensation, 4 nichtlineare achsfehler-kompensation – HEIDENHAIN TNC 335 Technical Manual Benutzerhandbuch
Seite 121
4-24
TNC 360
1 Maschinen-Achsen
3/95
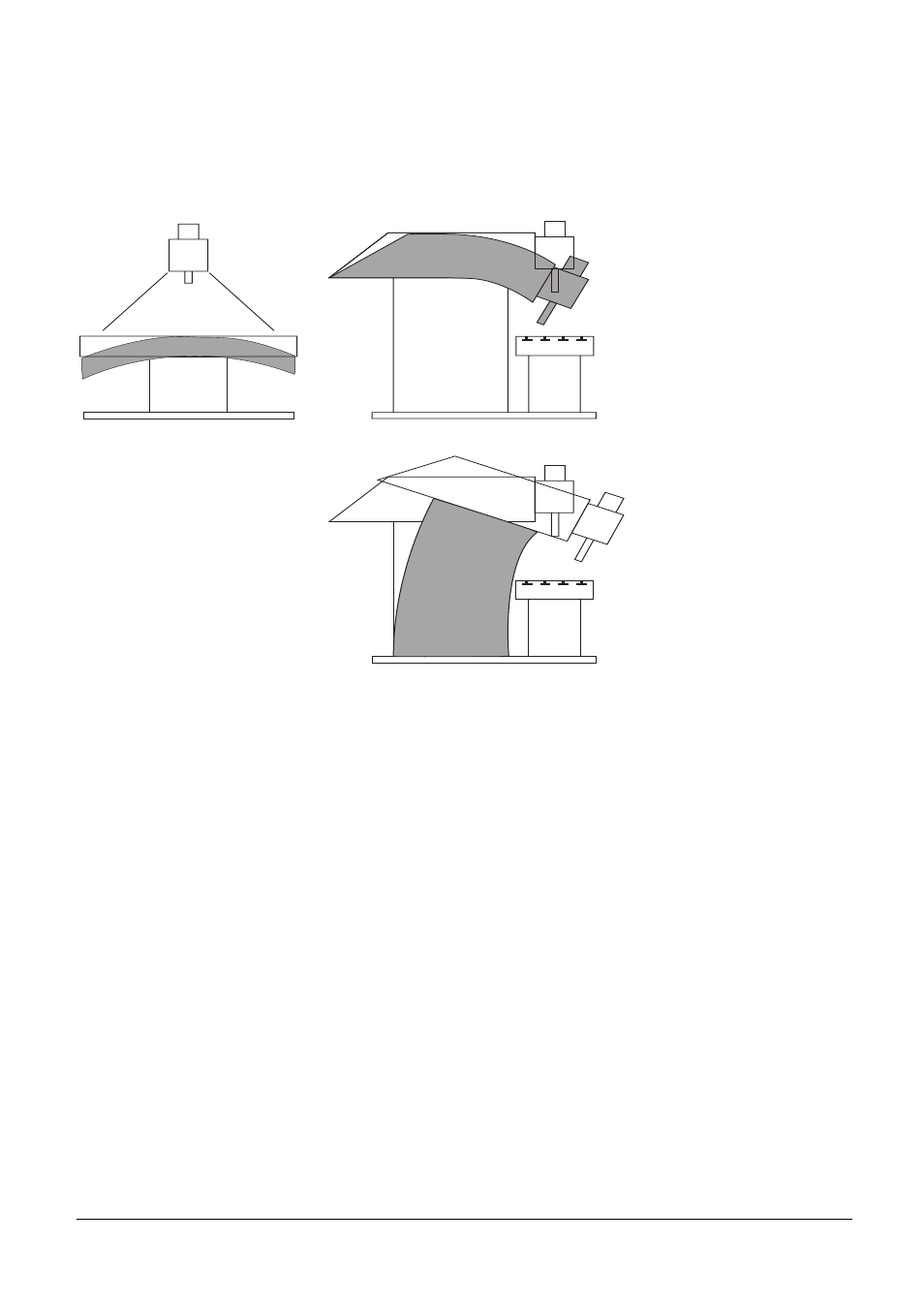
1.6.4 Nichtlineare Achsfehler-Kompensation
Bedingt durch die Konstruktion der Maschine oder äußere Einflüsse (z. B. Temperatur) kann ein
nichtlinearer Achsfehler auftreten.
Ein solcher Achsfehler wird üblicherweise über ein Vergleichs-Meßgerät (z. B. HEIDENHAIN
VM 101 A) festgestellt.
So könnte z. B. für die Achse Z der Spindelsteigungsfehler (Z=F(Z)) oder der Durchhang in
Abhängigkeit zur Achse Y (Z=F(Y)) ermittelt werden.
Bei der HEIDENHAIN-Bahnsteuerung kann eine Achse immer nur in Abhängigkeit zu einer
fehlerverursachenden Achse korrigiert werden. In unserem Beispiel kann also entweder die
Spindelsteigung oder der Durchhang kompensiert werden. Für jede der vier Achsen kann eine
Korrekturwert-Tabelle mit je 64 Korrekturwerten eingegeben werden. Dabei müssen folgende
Definitionen getroffen werden:
Zuordnung:
Korrektur in Abhängigkeit zu welcher Achse?
(X=F(X); X=F(Y) usw.)
Bezugspunkt:
Abstand zum Maschinen-Nullpunkt
Die Fehlerkurve muß am Bezugspunkt immer mit
Korrekturwert = 0 beginnen.
Abstand:
Abstand der Korrekturpunkte (Raster).
Eingabe des Exponenten zur Basis Zwei
(z. B. Eingabe 11 = 2
11
= 2,048 mm),
max. Eingabewert = 2
23
.
Beim Ermitteln der Fehlerkurve mit Hilfe eines Vergleichsmeßgeräts müssen die oben genannten
Definitionen bereits berücksichtigt werden. Dabei ist zu beachten, daß die Fehlerkurve am
Bezugspunkt beginnend in positiver Richtung fortgeführt wird.