BECKHOFF EL7037 Benutzerhandbuch
Seite 127
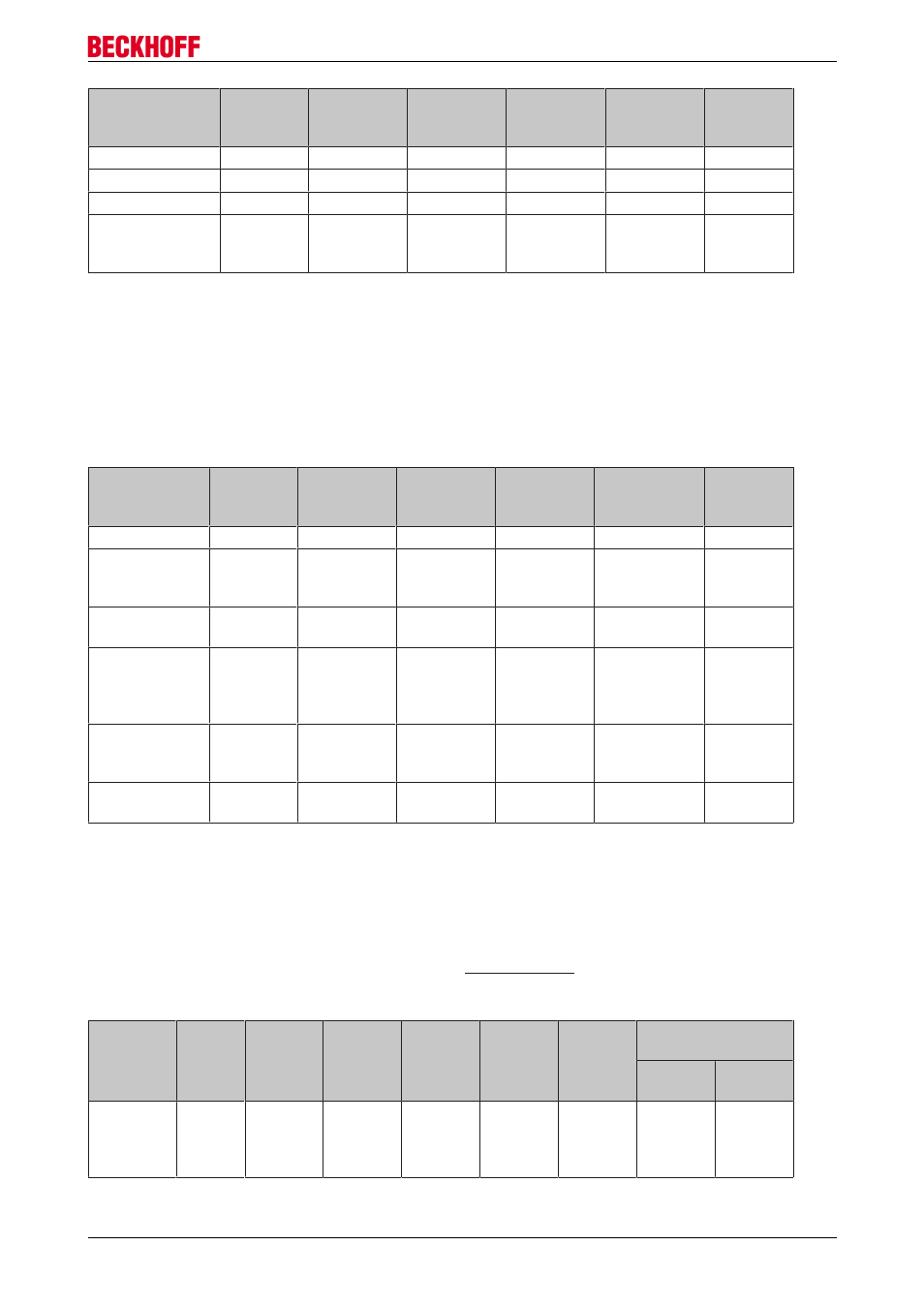
Inbetriebnahme
Automatik Velocity di-
rect
Position
controller
Extended
Velocity mo-
de
Extended
Position mo-
de
Velocity
sensor-
less
Fremdmotor
x
x
x
-
-
-
Mit Encoder
x
x
x
x
x
-
Ohne Encoder
x
x
x
-
-
x
Kommutierungs-
findung
erforderlich
-
-
-
x
x
-
Übersicht der Einschränkungen einzelner Betriebsarten
Vorteile der einzelnen Betriebsarten
Die folgende Matrix zeigt die Vorteile der einzelnen Betriebsarten auf.
Der Drehzahlregler kann bei Velocity sensorless nicht übermäßig hart eingestellt werden. Das führt zu einer
minimal eingeschränkten Fahrdynamik. Die Fahrdynamik der Betriebarten Velocity direkt und Position
controller ist für einen Schrittmotor sehr gut. Die Extended modes erreichen auf Grund der Feldorienterten
Regelung jedoch eine viel bessere Fahrdynamik, die schon fast einem Servomotor gleicht.
Automatik Velocity di-
rect
Position
controller
Extended
Velocity mo-
de
Extended Po-
sition mode
Velocity
sensor-
less
Regeldynamik
+
+
+
++
++
o
Schrittverlust-
erkennung
x
x
x
Schrittverlus-
te ausge-
schlossen
Schrittverluste
ausgeschlos-
sen
-
Lastwinkel-
erkennung
x
x
x
immer 90°
immer 90°
-
Positioning
interface
abhängig
von Be-
triebsarten-
auswahl
-
x
-
x
-
Lastab-
hängiger
Strom
-
-
-
x
x
ja, wenn
velo > velo-
min
Energie
Effizienz
o
o
o
++
++
o, +
Übersicht der Vorteile einzelner Betriebsarten
Notwendige Parametereinstellungen der einzelnen Betriebsarten
Die folgende Matrix gibt einer Übersicht über die Parameter, die für die einzelnen Betriebsarten zwingend
erforderlich sind.
entsprechende Datei kann in die Start up Liste eingefügt werden. Mit dieser Datei sind die Parameter sehr
gut voreingestellt. Ein geringes Finetuning kann applikationsbedingt jedoch vorteilhaft sein.
Velocity
direct
Position
controller
Extended
velocity
mode
Extended
position
mode
Velocity
sensor-
less
Lastwin-
kelerken-
nung
Schrittverlusterken-
nung
mit Enco-
der
mit Enco-
der
Index
8010:03
Nominal
voltage
X
x
x
x
x
x
x
x
EL70x7
127
Version 1.0