BECKHOFF EL7037 Benutzerhandbuch
Seite 156
Inbetriebnahme
Beispiele von zwei Fahraufträgen mit dynamischer Änderung der Zielposition
Ohne Überfahren der Zielposition
Zeitpunkt
POS Outputs
POS Inputs
Beschreibung
t1:
Execute = 1
Target position = 200000
Velocity = 2000
Start type = 0x0001
Acceleration = 1000
Deceleration = 1000
Busy = 1
Accelerate = 1
- Vorgabe der ersten Parameter
- Beginn der Beschleunigungsphase
t2:
Accelerate = 0
- Ende der Beschleunigungsphase
t3:
Target position = 100000
Velocity = 1500
Start type = 0x1001
Acceleration = 2000
Deceleration = 2000
- Änderung der Parameter
- Aktivierung durch neuen Starttypen
t4:
Decelerate = 1
- Beginn der Verzögerungsphase
t5:
Execute = 0
Busy = 0
In-Target = 1
Decelerate = 0
- Ende der Verzögerungsphase
- Motor ist auf neuer Zielposition
t6 - t9:
- Absolute Fahrt zurück auf die
Startposition 0
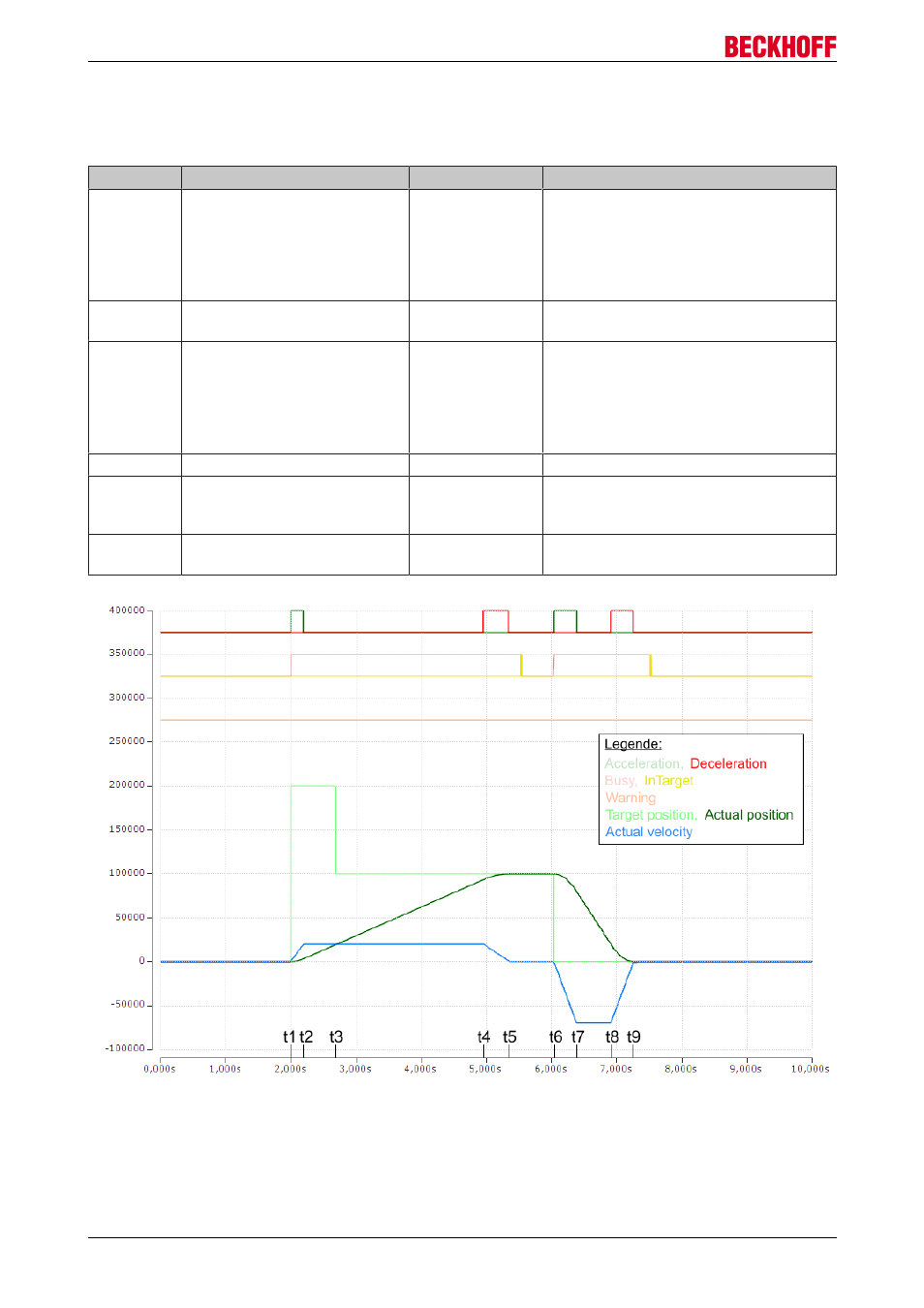
Abb. 174: Scope-Aufnahme eines Fahrauftrages mit dynamischer Änderung der Zielposition, ohne Überfah-
ren der Zielposition
(Die Achsen-Skalierung bezieht sich nur auf die Positionen, nicht auf die Geschwindigkeit und die Status-
Bits)
EL70x7
156
Version 1.0