Konfiguration mit dem twincat system manager – BECKHOFF EL7037 Benutzerhandbuch
Seite 160
Konfiguration mit dem TwinCAT System Manager
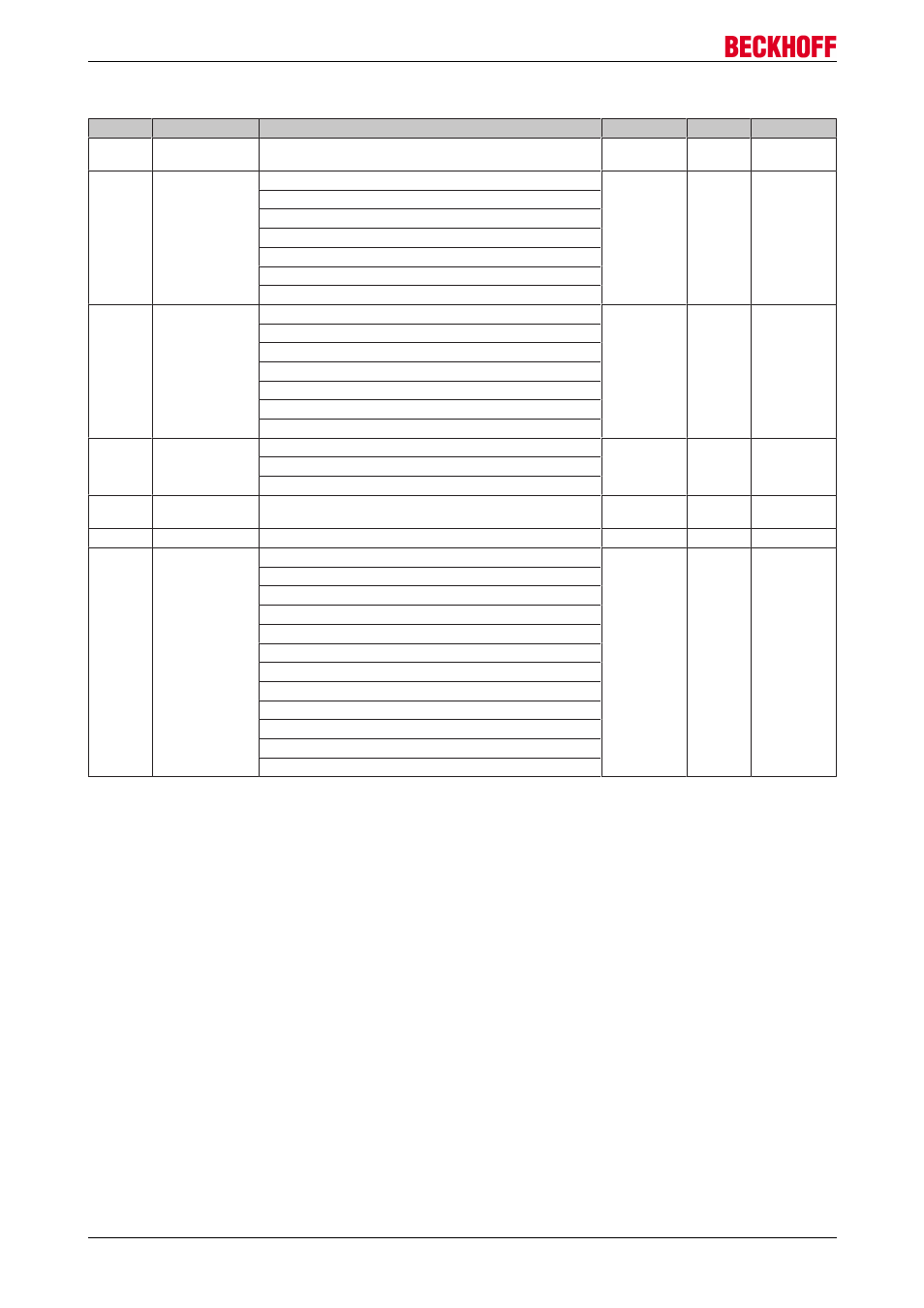
Index 8012 STM Features Ch.1 (Teil 1)
Index
Name
Bedeutung
Datentyp
Flags
Default
8012:0
STM Features
Ch.1
Maximaler Subindex
UINT8
RO
0x3A (58
dez
)
8012:01
Operation mode
erlaubte Werte:
BIT4
RW
0x00 (0
dez
)
0: Automatic
1: Velocity direct
3: Position controller
4: Ext. Velocity mode
5: Ext. Position mode
6: Velocity sensorless
8012:05
Speed range
erlaubte Werte:
BIT3
RW
0x01 (1
dez
)
0: 1000 Fullsteps/sec
1: 2000 Fullsteps/sec
2: 4000 Fullsteps/sec
3: 8000 Fullsteps/sec
4: 16000 Fullsteps/sec
5: 32000 Fullsteps/sec
8012:08
Feedback type
erlaubte Werte:
BIT1
RW
0x01 (1
dez
)
0: Encoder
1: internal counter
8012:09
Invert motor pola-
rity
Drehrichtung des Motors invertieren
BOOLEAN
RW
0x00 (0
dez
)
8012:0A
Error on step lost
Fehler bei Schrittverlust
BOOLEAN
RW
0x00 (0
dez
)
8012:11
Select info data 1 erlaubte Werte:
UINT8
RW
0x0B (11
dez
)
0: Status word
7: Motor velocity
11: Motor load
13: Motor dc current
101: Internal temperature
103: Control voltage
104: Motor supply voltage
150: Drive - Status word
151: Drive - State
152: Drive - Position lag (low word)
153: Drive - Position lag (high word)
EL70x7
160
Version 1.0