3 position controller – BECKHOFF EL7037 Benutzerhandbuch
Seite 131
Inbetriebnahme
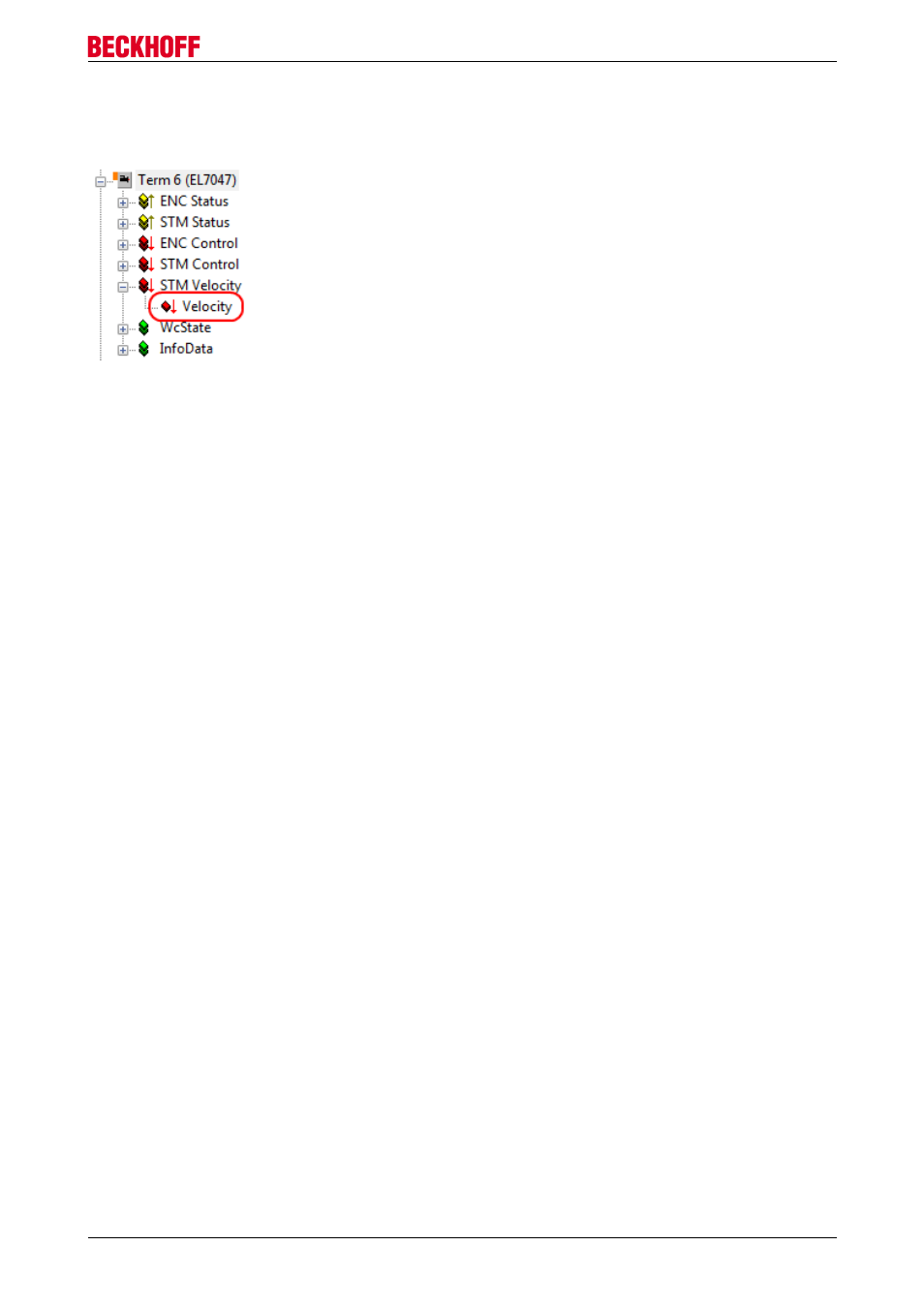
• Über die zyklische Variable STM velocity (Abb. "Eingabe der Geschwindigkeit") können Sie eine
definierte Geschwindigkeit vorgeben.
Die Geschwindigkeit wird in % der Speed range (Index 8012:05 [
184]) angegeben. Der Wert +32767
entspricht 100% und der Wert -32767 entspricht -100%.
Abb. 142: Eingabe der Geschwindigkeit
5.4.3
Position controller
In der Betriebsart Position controller arbeitet die EL70x7 im zyklischen Positionsinterface. Über die Variable
STM Position kann eine definierte Position eingestellt werden.
Hinweise
• Dieser Betriebsmodus kann sowohl mit angeschlossenem Encoder, als auch mit dem internen Zähler
(ohne Encoder) genutzt werden.
• Die Prozessdaten können entweder mit Hilfe der TwinCAT NC oder direkt aus der PLC übertragen
werden (Positioning interface).
• Fremdmotoren werden unterstützt
Step by Step
• Fügen Sie die Klemme, wie im Kapitel Konfigurationserstellung TwinCAT - manuell [
75] beschrieben, zur Konfiguration hinzu.
• Verknüpfen Sie die Klemme, wie im Kapitel Einbindung in die NC-Konfiguration [
108] beschrieben,
mit der NC (wenn TwinCAT NC genutzt wird).
• Konfigurieren Sie die EL70x7
◦ automatisch - importieren Sie die Motor XML Datei, wie im Kapitel Einstellungen im CoE - au-
109] beschrieben, in das Start-up Verzeichnis.
◦ manuell - konfigurieren Sie die Parameter, wie im Kapitel Einstellungen im CoE - manuell
109] beschrieben.
• Stellen Sie die Betriebsart im CoE-Verzeichnis auf Position controller [
184], Abb. "Auswahl Position
controller".
EL70x7
131
Version 1.0