Konfiguration mit dem twincat system manager – BECKHOFF EL7037 Benutzerhandbuch
Seite 161
Konfiguration mit dem TwinCAT System Manager
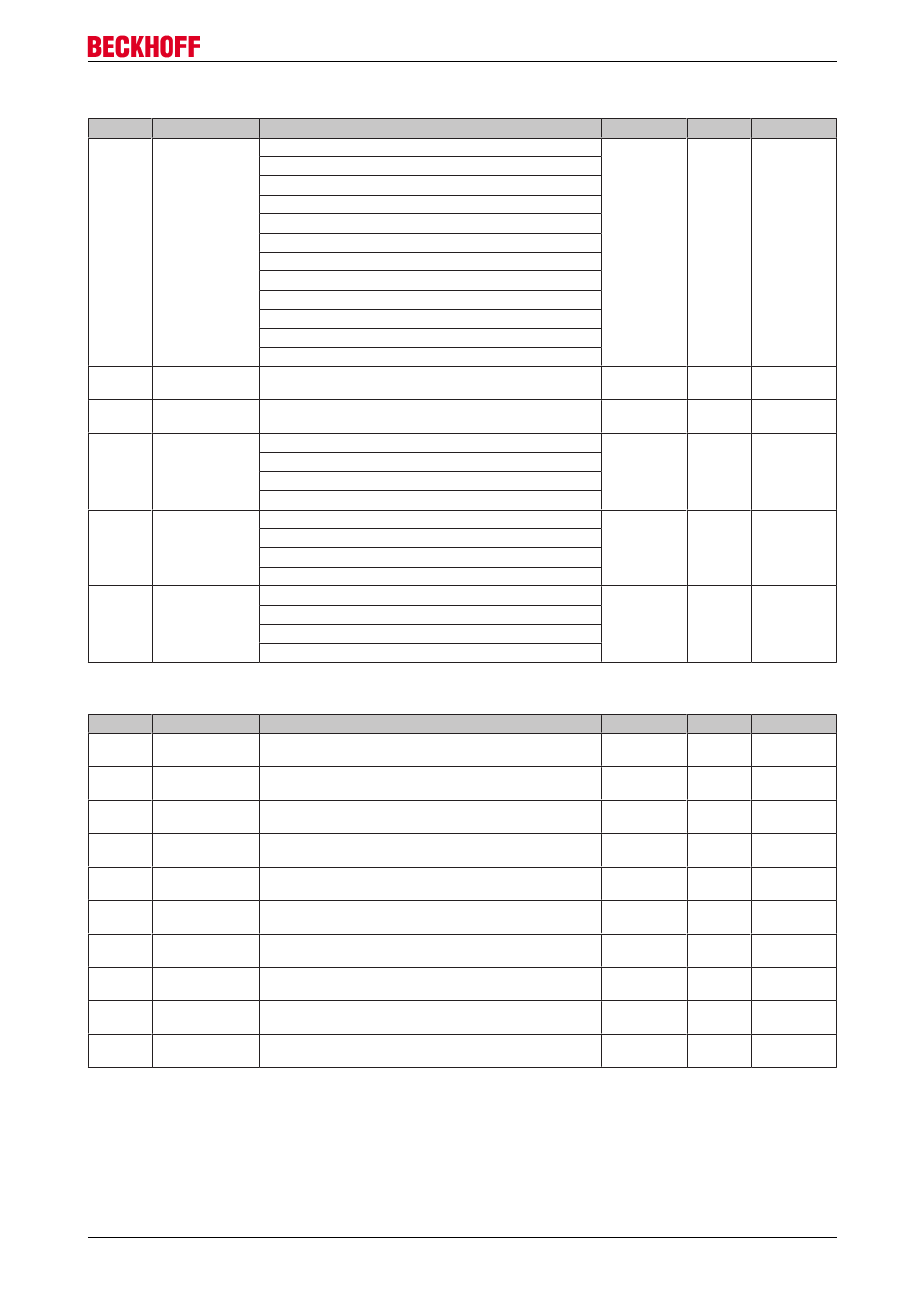
Index 8012 STM Features Ch.1 (Teil 2)
Index
Name
Bedeutung
Datentyp
Flags
Default
8012:19
Select info data 2 erlaubte Werte:
UINT8
RW
0x0D (13
dez
)
0: Status word
7: Motor velocity
11: Motor load
13: Motor dc current
101: Internal temperature
103: Control voltage
104: Motor supply voltage
150: Drive - Status word
151: Drive - State
152: Drive - Position lag (low word)
153: Drive - Position lag (high word)
8012:30
Invert digital input
1
Digitalen Eingang invertieren
BOOLEAN
RW
0x00 (0
dez
)
8012:31
Invert digital input
2
Digitalen Eingang invertieren
BOOLEAN
RW
0x00 (0
dez
)
8012:32
Function for input
1
erlaubte Werte:
BIT4
RW
0x00 (0
dez
)
0: Normal input
1: Hardware enable
2: PLC cam
8012:36
Function for input
2
erlaubte Werte:
BIT4
RW
0x00 (0
dez
)
0: Normal input
1: Hardware enable
2: PLC cam
8012:3A
Function for out-
put 1
erlaubte Werte:
BIT4
RW
0x0F (15
dez
)
0: Normal output
1: Break (linked with driver enable)
15: Disabled
Index 8014 STM Controller Settings 3 Ch.1
Index
Name
Bedeutung
Datentyp
Flags
Default
8014:0
STM Controller
Settings 3 Ch.1
Maximaler Subindex
UINT8
RO
0x09 (9
dez
)
8014:01
Feed forward
(pos.)
Vorsteuerung des Positionsreglers
UINT32
RW
0x000186A0
(100000
dez
)
8014:02
Kp factor (pos.)
Kp-Regelfaktor des Positionsreglers
UINT16
RW
0x01F4
(500
dez
)
8014:03
Kp factor (velo.)
Kp-Regelfaktor des Geschwindigkeitsreglers
Einheit : 0,1 mA/(rad/s)
UINT32
RW
0x00000032
(50
dez
)
8014:04
Tn (velo.)
Zeitkonstante Tn des Geschwindigkeitsreglers
Einheit : 0,01 ms
UINT16
RW
0xC350
(50000
dez
)
8014:05
Sensorless param
1
1. Parameter (sensorlosen Regelung)
UINT16
RW
0x0000 (0
dez
)
8014:06
Sensorless param
2
2. Parameter (sensorlosen Regelung)
UINT16
RW
0x0000 (0
dez
)
8014:07
Cross over veloci-
ty 1
1. Geschwindigkeitsübergang (sensorlosen Regelung)
Einheit : 0,1 rad/s
UINT16
RW
0x0000 (0
dez
)
8014:08
Cross over veloci-
ty 2
2. Geschwindigkeitsübergang (sensorlosen Regelung)
Einheit : 0,1 rad/s
UINT16
RW
0x0000 (0
dez
)
8014:09
Cross over veloci-
ty 3
3. Geschwindigkeitsübergang (sensorlosen Regelung)
Einheit : 0,1 rad/s
UINT16
RW
0x0000 (0
dez
)
EL70x7
161
Version 1.0