Velocity direct, Position controller, 184], abb – BECKHOFF EL7037 Benutzerhandbuch
Seite 184: 8012:0a, Extended velocity mode, Ext. position mode, Konfiguration mit dem twincat system manager
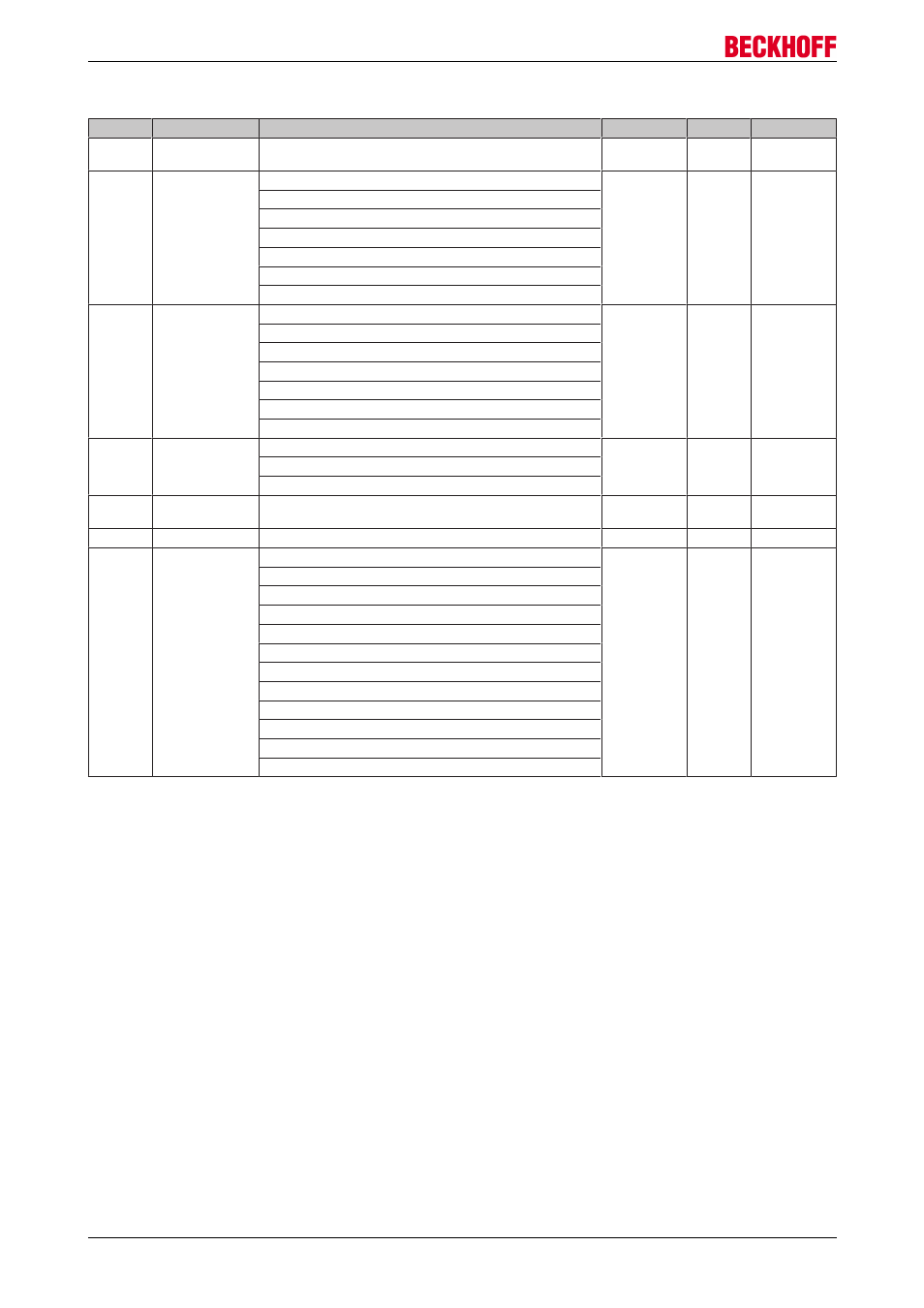
Konfiguration mit dem TwinCAT System Manager
Index 8012 STM Features Ch.1 (Teil 1)
Index
Name
Bedeutung
Datentyp
Flags
Default
8012:0
STM Features
Ch.1
Maximaler Subindex
UINT8
RO
0x3A (58
dez
)
8012:01
Operation mode
erlaubte Werte:
BIT4
RW
0x00 (0
dez
)
0: Automatic
1: Velocity direct
3: Position controller
4: Ext. Velocity mode
5: Ext. Position mode
6: Velocity sensorless
8012:05
Speed range
erlaubte Werte:
BIT3
RW
0x01 (1
dez
)
0: 1000 Fullsteps/sec
1: 2000 Fullsteps/sec
2: 4000 Fullsteps/sec
3: 8000 Fullsteps/sec
4: 16000 Fullsteps/sec
5: 32000 Fullsteps/sec
8012:08
Feedback type
erlaubte Werte:
BIT1
RW
0x01 (1
dez
)
0: Encoder
1: internal counter
8012:09
Invert motor pola-
rity
Drehrichtung des Motors invertieren
BOOLEAN
RW
0x00 (0
dez
)
8012:0A
Error on step lost
Fehler bei Schrittverlust
BOOLEAN
RW
0x00 (0
dez
)
8012:11
Select info data 1 erlaubte Werte:
UINT8
RW
0x0B (11
dez
)
0: Status word
7: Motor velocity
11: Motor load
13: Motor dc current
101: Internal temperature
103: Control voltage
104: Motor supply voltage
150: Drive - Status word
151: Drive - State
152: Drive - Position lag (low word)
153: Drive - Position lag (high word)
EL70x7
184
Version 1.0